|
|
|
Real Academia
Logo de letraherido.com:
|
DE LOS ROBOTS
CONCEPTO DE ROBÓTICA Y ROBOT
La robótica es la ciencia y la tecnología de los robots. Se ocupa del diseño, manufactura y aplicaciones de los robots. La robótica combina diversas disciplinas como son: la mecánica, la electrónica, la informática, la inteligencia artificial y la ingeniería de control. Otras áreas importantes en robótica son el álgebra, los autómatas programables y las máquinas de estados. El término robot se popularizó con el éxito de la obra RUR (Robots Universales Rossum), escrita por Karel Capek en 1920. En la traducción al inglés de dicha obra, la palabra checa robota, que significa servidumbre o trabajos forzados, fue traducida al inglés como robot. Sin embargo, no fue este autor Čapek quien inventó la palabra. En una breve carta escrita a la editorial del Diccionario Oxford, atribuye a su hermano Josef la creación del término. En un artículo aparecido en 1933 en la revista checa Lidové noviny, explicó que en un principio había querido llamar a sus criaturas laboři (del latín labor, trabajo). Pero no le gustó la palabra y pidió consejo a su hermano, que sugirió "roboti". La palabra robota significa literalmente "trabajo", "tarea" o "servidumbre" en checo y en muchos idiomas eslavos.[3] La servidumbre se había prohibido en 1848 en Bohemia, de modo que en la época en la que se escribió R.U.R. el uso del término se había ampliado para abarcar diversos tipos de trabajo, aunque la connotación de "siervo" aún sería conocida. Aunque los robots de Čapek eran humanos artificiales orgánicos, la palabra robot es casi siempre utilizada para referirse a humanos mecánicos. El término androide se refiere a los autómatas con forma humana, mientras que un cyborg ("organismo cibernético" u "hombre biónico") es una criatura que posee partes orgánicas y mecánicas.
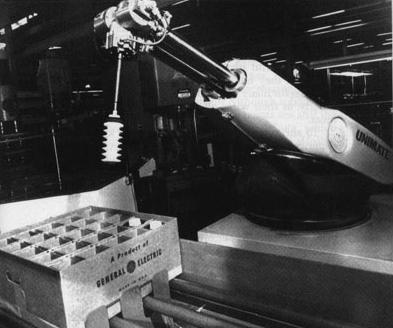
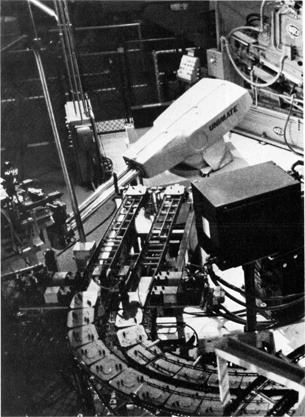
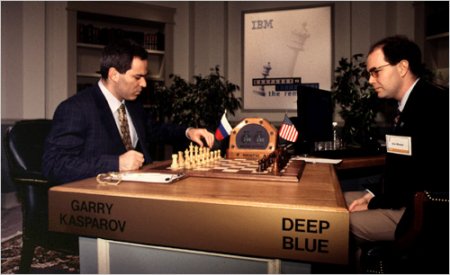
El término robótica es acuñado por Isaac Asimov, definiendo a la ciencia que estudia a los robots. Asimov creó también las Tres Leyes de la Robótica. En la ciencia ficción el hombre ha imaginado a los robots visitando nuevos mundos, haciéndose con el poder, o simplemente aliviando de las labores caseras. Un robot es una entidad virtual o mecánica artificial. En la práctica, esto es por lo general un sistema electromecánico que, por su apariencia o sus movimientos, ofrece la sensación de tener un propósito propio. La palabra robot puede referirse tanto a mecanismos físicos como a sistemas virtuales de software, aunque suele aludirse a los segundos con el término de bots. No hay un consenso sobre qué máquinas pueden ser consideradas robots, pero sí existe un acuerdo general entre los expertos y el público sobre que los robots tienden a hacer parte o todo lo que sigue: moverse, hacer funcionar un brazo mecánico, sentir y manipular su entorno y mostrar un comportamiento inteligente, especialmente si ése comportamiento imita al de los humanos o a otros animales. Aunque las historias sobre ayudantes y acompañantes artificiales, así como los intentos de crearlos, tienen una larga historia, las máquinas totalmente autónomas no aparecieron hasta el siglo XX. El primer robot programable y dirigido de forma digital, el Unimate, fue instalado en 1961 para levantar piezas calientes de metal de una máquina de tinte y colocarlas.
Por lo general, la gente reacciona de forma positiva ante los robots con los que se encuentra. Los robots domésticos para la limpieza y mantenimiento del hogar son cada vez más comunes en los hogares. No obstante, existe una cierta ansiedad sobre el impacto económico de la automatización y la amenaza del armamento robótico, una ansiedad que se ve reflejada en el retrato a menudo perverso y malvado de robots presentes en obras de la cultura popular. Comparados con sus colegas de ficción, los robots reales siguen siendo limitados.
CLASIFICACIÓN DE LOS ROBOTS Por su arquitectura:
Por la potencia del software que los controla: La potencia del software en el controlador determina la utilidad y flexibilidad del robot dentro de las limitantes del diseño mecánico y la capacidad de los sensores. Los robots han sido clasificados de acuerdo a su generación, a su nivel de inteligencia, a su nivel de control, y a su nivel de lenguaje de programación. Estas clasificaciones reflejan la potencia del software en el controlador, en particular, la sofisticada interacción de los sensores. La generación de un robot se determina por el orden histórico de desarrollos en la robótica. Cinco generaciones son normalmente asignadas a los robots industriales. La tercera generación es utilizada en la industria, la cuarta se desarrolla en los laboratorios de investigación, y la quinta generación es un gran sueño. 1.- Robots Play-back, los cuales regeneran una secuencia de instrucciones grabadas, como un robot utilizado en recubrimiento por spray o soldadura por arco. Estos robots comúnmente tienen un control de lazo abierto. 2.- Robots controlados por sensores, estos tienen un control en lazo cerrado de movimientos manipulados, y hacen decisiones basados en datos obtenidos por sensores. 3.- Robots controlados por visión, donde los robots pueden manipular un objeto al utilizar información desde un sistema de visión. 4.- Robots controlados adaptablemente, donde los robots pueden automáticamente reprogramar sus acciones sobre la base de los datos obtenidos por los sensores. 5.- Robots con inteligencia artificial, donde las robots utilizan las técnicas de inteligencia artificial para hacer sus propias decisiones y resolver problemas.
Por su nivel de inteligencia: La Asociación de Robots Japonesa (JIRA) ha clasificado a los robots dentro de seis clases sobre la base de su nivel de inteligencia: 1.- Dispositivos de manejo manual, controlados por una persona. 2.- Robots de secuencia arreglada. 3.- Robots de secuencia variable, donde un operador puede modificar la secuencia fácilmente. 4.- Robots regeneradores, donde el operador humano conduce el robot a través de la tarea. 5.- Robots de control numérico, donde el operador alimenta la programación del movimiento, hasta que se enseñe manualmente la tarea. 6.- Robots inteligentes, los cuales pueden entender e interactuar con cambios en el medio ambiente.
Por el nivel de control: Los programas en el controlador del robot pueden ser agrupados de acuerdo al nivel de control que realizan. 1.- Nivel de inteligencia artificial, donde el programa aceptará un comando como "levantar el producto" y descomponerlo dentro de una secuencia de comandos de bajo nivel basados en un modelo estratégico de las tareas. 2.- Nivel de modo de control, donde los movimientos del sistema son modelados, para lo que se incluye la interacción dinámica entre los diferentes mecanismos, trayectorias planeadas, y los puntos de asignación seleccionados. 3.- Niveles de servosistemas, donde los actuadores controlan los parámetros de los mecanismos con el uso de una retroalimentación interna de los datos obtenidos por los sensores, y la ruta es modificada sobre la base de los datos que se obtienen de sensores externos. Todas las detecciones de fallas y mecanismos de corrección son implementadas en este nivel.
Por el nivel del lenguaje de programación: En la clasificación final se considerara el nivel del lenguaje de programación. La clave para una aplicación efectiva de los robots para una amplia variedad de tareas, es el desarrollo de lenguajes de alto nivel. Existen muchos sistemas de programación de robots, aunque la mayoría del software más avanzado se encuentra en los laboratorios de investigación. Los sistemas de programación de robots caen dentro de tres clases: 1.- Sistemas guiados, en el cual el usuario conduce el robot a través de los movimientos a ser realizados. 2.- Sistemas de programación de nivel-robot, en los cuales el usuario escribe un programa de computadora al especificar el movimiento y el sensado. 3.- Sistemas de programación de nivel-tarea, en el cual el usuario especifica la operación por sus acciones sobre los objetos que el robot manipula.
SUBSISTEMAS FUNCIONALES Un robot puede ser visto en diferentes niveles de sofisticación, depende de la perspectiva con que se mire. Un técnico en mantenimiento puede ver un robot como una colección de componentes mecánicos y electrónicos; por su parte un ingeniero en sistemas puede pensar que un robot es una colección de subsistemas interrelacionados; un programador en cambio, simplemente lo ve como una máquina ha ser programada; por otro lado para un ingeniero de manufactura es una máquina capaz de realizar un tarea específica. En contraste, un científico puede pensar que un robot es un mecanismo el cuál él construye para probar una hipótesis. Un robot puede ser descompuesto en un conjunto de subsistemas funcionales: procesos, planeación, control, sensores, sistemas eléctricos, y sistemas mecánicos. El subsistema de Software es una parte implícita de los subsistemas de sensores, planeación, y control; que integra todos los subsistemas como un todo. En la actualidad, muchas de las funciones llevadas a cabo por los subsistemas son realizadas manualmente, o de una forma off-line, pero en un futuro las investigaciones en estos campos permitirán la automatización de dichas tareas. El Subsistema de Procesos incluye las tareas que lleva acabo el robot, el medio ambiente en el cual es colocado, y la interacción entre este y el robot. Este es el dominio de la ingeniería aplicada. Antes de que un robot pueda realizar una tarea, ésta debe ser buscada dentro de una secuencia de pasos que el robot pueda ejecutar. La tarea de búsqueda es llevada a cabo por el Subsistema de Planeación, el cual incluye los modelos de procesos inteligentes, percepción y planeación. En el modelo de procesos, los datos que se obtienen de una variedad de sensores son fusionados (Integración Sensorial) con modelos matemáticos de las tareas para formar un modelo del mundo. Al usar este modelo de mundo, el proceso de percepción selecciona la estrategia para ejecutar la tarea. Estas estrategias son convertidas dentro de los programas de control de el robot durante el proceso de planeación. Estos programas son ejecutados por el Subsistema de Control; en este subsistema, los comandos de alto nivel son convertidos en referencias para actuadores físicos, los valores retroalimentados son comparados contra estas referencias, y los algoritmos de control estabilizan el movimiento de los elementos físicos. Al realizar ésta tarea los mecanismos son modelados, el proceso es modelado, la ganancia de lazo cerrado puede ser adaptada, y los valores medidos son utilizados para actualizar los procesos y los modelos de los mecanismos. Desde el subsistema de control se alimentan las referencias de los actuadores al Subsistema Eléctrico el cual incluye todos los controles eléctricos de los actuadores. Los actuadores hidráulicos y neumáticos son usualmente manejados por electroválvulas controladas. También, este subsistema contiene computadoras, interfaces, y fuentes de alimentación. Los actuadores manejan los mecanismos en el Subsistema Mecánico para operar en el medio ambiente, esto es, realizar una tarea determinada. Los parámetros dentro del robot y del medio ambiente son monitoreados por el Subsistema de Sensores; ésta información sensórica se utiliza como retroalimentación en las ganancias de lazo cerrado para detectar potencialmente las situaciones peligrosas, para verificar que las tareas se realizan correctamente, y para construir un modelo del mundo.
PARTES DE UN ROBOT Como todo dispositivo funcional, los robots tienen una estructura formada por diferentes sistemas o subsistemas y componentes. Si observamos la forma y el funcionamiento de los diferentes tipos de robots podemos deducir que todos tienen algo en común:
Así como en la naturaleza, los robots pueden ser del tipo "endoesqueleto", donde la estructura es interna y los demás componentes externos, o "exoesqueleto", donde la estructura está por fuera y cubre los demás elementos. Las formas de las estructuras son de lo más variadas, tanto hasta donde la imaginación y la aplicación que se le va a dar al robot lo permitan.
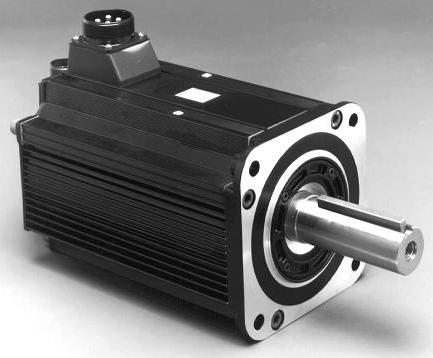
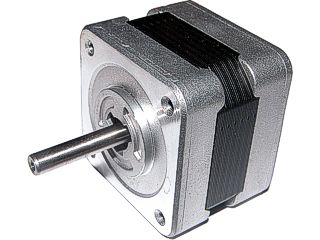
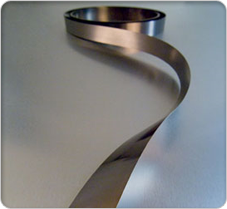
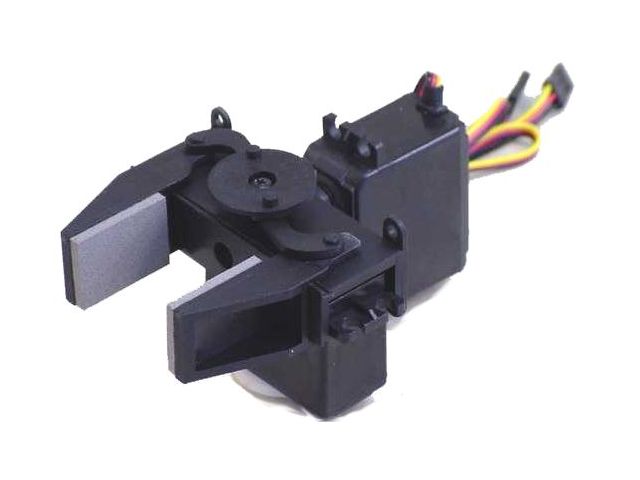
Servomotor y Motor Paso a paso Un motor es un dispositivo que convierte la energía eléctrica en energía mecánica rotacional que se utiliza para darle movimiento a ruedas y otros medios de locomoción. En robótica se utilizan motores de CC (corriente continua), servomotores y motores paso a paso. Una fuente de movimiento nueva que apareció recientemente en el mercado son los músculos eléctricos, basados en un metal especial llamado Nitinol.
Nitinol (Aleación con Memoria de Forma de Niquel y Titanio)
Se suelen emplear conjuntos de engranajes para tal fin, aunque también se usan ruedas de fricción o poleas y correas.
Transmisiones
El más común es la mano mecánica, llamada en inglés "gripper" y derivada de la mano humana. En los robots industriales se usan mecanismos especiales para sostener herramientas o piezas de formas determinadas.
En los robots de juguete o didácticos se pueden emplear baterías comunes o pilas, y en los de muy bajo consumo celdas solares.
Robots "a gasolina" y "solar"
Estos sensores pretenden en cierta forma imitar los sentidos que tienen los seres vivos. Entre los diferentes sensores que podemos encontrar están las fotoceldas, los fotodiodos, los micrófonos, los sensores de toque, de presión, de temperatura, de ultrasonidos e incluso cámaras de video como parte importante de una "visión artificial" del robot.
Sensores "de distancias", "tactil" y "de visión"
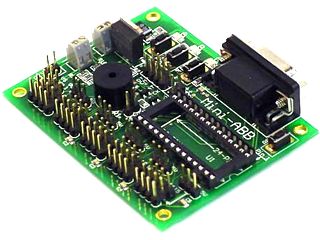
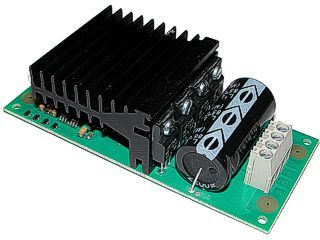
Actualmente los modernos microprocesadores y microcontroladores, así como otros circuitos específicos para el manejo de motores y relés, los conversores A/D y D/A, reguladores de voltaje, simuladores de voz, etc. permiten diseñar y construir tarjetas de control para robots muy eficientes y de costo no muy elevado. El bajo costo actual de una computadora personal permite utilizarla para controlar robots de cualquier tipo utilizando las grandes ventajas que supone dicho dispositivo.
Pasando al entorno industrial, podemos observar lo siguiente en los dispositivos que se encuentran instalados en muchísimas fábricas: En los sistemas automáticos de manipulación de piezas u objetos podemos distinguir tres partes estructurales muy bien definidas.
Detallando ahora estos elementos podemos ver la estructura de un robot de tipo industrial en la siguiente tabla, observemos que el brazo mecánico es sólo una parte de todo el mecanismo:
Los elementos rígidos del brazo están relacionados entre sí mediante articulaciones, las cuales pueden ser giratorias o prismáticas. El número de elementos del brazo y el de las articulaciones que los relacionan determinan los grados de libertad del manipulador, que en los robots industriales suele ser seis.
La complejidad del control varía con los parámetros que se manejan, existiendo varias categorías de controlador: · El controlador de posición solo interviene en el control de posición del elemento terminal, pudiendo actuar punto a punto, o bien en modo continuo. · El controlador cinemático además de la posición controla la velocidad del brazo. · El controlador dinámico tiene en cuenta también las propiedades dinámicas del manipulador, motores y elementos asociados. · El control adaptativo, además de lo indicado en los anteriores, también considera la variación de las características del manipulador al variar la posición. Desde otra óptica, el controlador puede ser de lazo abierto o de lazo cerrado. En el primero se manda una señal de control, pero no se verifica si se ha reproducido con exactitud o se ha cometido un error al ejecutarse. En el segundo caso, existe una realimentación de la salida, cuya información se compara con la señal de mando, tratándose el error, si lo hubiera, de manera adecuada para lograr alcanzar lo que se pretendía con la señal de mando.
Su clasificación se realiza de acuerdo al tipo de energía que utilizan: · Los actuadores neumáticos emplean el aire comprimido como fuente de energía y se utilizan para controlar movimientos rápidos pero de no mucha precisión. · Los actuadores hidráulicos se utilizan cuando se requiere una gran capacidad de carga, junto con una precisa regulación de velocidad. · Los actuadores eléctricos son los que más se utilizan, por su fácil y preciso control, y por las ventajas del funcionamiento mediante energía eléctrica.
Por lo general deberá soportar una elevada capacidad de carga, y al mismo tiempo convendrá que sea de reducido peso y tamaño.
De esta manera, con la información actualizada permanentemente, hace de estos robots autoprogramables, lo que supone disponer de un cierto grado de Inteligencia artificial.
En la siguiente tabla se pueden apreciar la mayor parte de las características que llevan a decidir entre un robot industrial y otro:
ANDROIDES Y CYBORGS
ANDROIDE
Androide es un término mencionado por primera vez por Alberto Magno en 1270 y popularizado por el autor francés Villiers en su novela de 1886 L'Ève future, es la denominación que se le da a un robot antropomorfo que, además de imitar la apariencia humana, imita algunos aspectos de su conducta de manera autónoma. Etimológicamente "androide" se refiere a los robots humanoides de fisionomía masculina, a los robots de apariencia femenina se les llama ocasionalmente ginoides, principalmente en las obras de ciencia ficción, aunque en el lenguaje coloquial el término androide suele usarse para ambos casos. Androides en la cultura popular Un robot humanoide que se limita a imitar los actos y gestos de un controlador humano, no es visto por el público como un verdadero androide, sino como una simple marioneta animatrónica. El androide siempre ha sido representado como una entidad que imita al ser humano tanto en apariencia, como en capacidad mental e iniciativa. Antes incluso de haber visto un verdadero robot en acción, la mayoría de las personas asocian la idea de robot con la de androide, debido a su extrema popularidad como cliché de la ciencia ficción. De hecho, cuando en la cultura popular o en los medios gráficos se quiere representar o caricaturizar a un robot, se utiliza para ello el estereotípico androide: una criatura humanoide metalizada, con antena y con junturas en las articulaciones (estereotipo del cual el personaje Bender de la serie de televisión animada Futurama es un muy buen ejemplo).
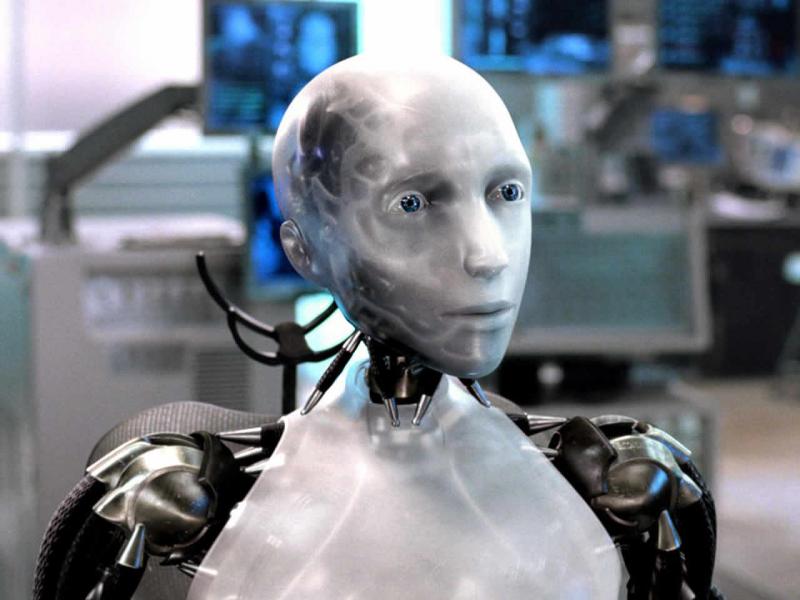
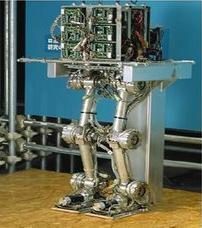
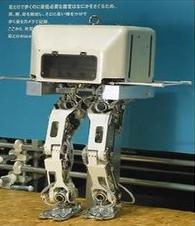
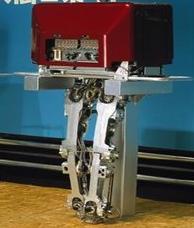
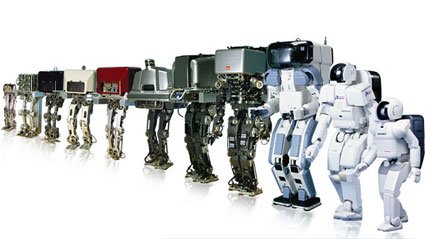
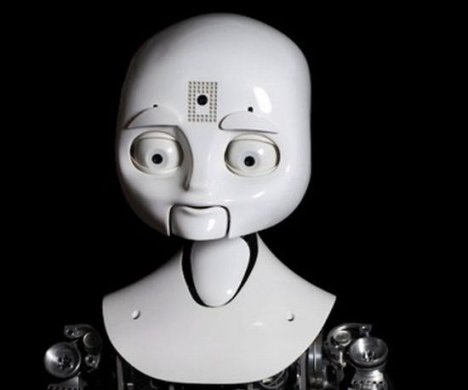
La actitud de base entre el público frente a los androides varía en función del bagaje cultural que posea dicho público. En la cultura occidental la criatura humanoide, fabricada casi siempre por un sabio, es con bastante frecuencia un monstruo que se rebela contra su creador y en ocasiones lo destruye como castigo por su hubris; y el primero de los cuales no es necesariamente el monstruo de Frankenstein de Mary Shelley. Bien que dicho monstruo sea fácilmente el más famoso. Desde la Grecia Antigua existen leyendas y folklore narrando sobre seres humanoides fabricados en metal por el artesano y herrero de los dioses, Hefesto. Aunque el carácter monstruoso del androide parece haberse ganado con la cristianización del mundo occidental. De hecho es tan notorio este fenómeno, que el reconocido experto en inteligencia artificial Marvin Minsky, llegó a narrar como en ocasiones llegaba a sentirse incómodo frente a una de sus creaciones, el androide Cog, cuando éste presentaba conductas inesperadas. En otras culturas las reacciones pueden ser bastante diferentes. Un ejemplo meritorio es la actitud japonesa faz a los androides, donde el público no teme la antropomorfización de las máquinas, y aceptan por lo tanto con menos problemas la idea que un robot tenga apariencia humana, para poder así interactuar más fácilmente con seres humanos. Androides en la ciencia En la robótica la actitud de los expertos hacia los autómatas humanoides ha vacilado entre el entusiasmo y el escepticismo. Entusiasmo porque un robot humanoide puede tener enormes ventajas para cierta clase de funciones, escepticismo debido a que para que una máquina robótica sea útil, ya se ha demostrado con ejemplos que la forma humana no es necesaria, y a veces es incluso un estorbo (respecto a las capacidades actuales de los androides). La construcción de un robot que imite convincentemente aunque sea una parte ínfima de la libertad de gestos y movimiento humanos, es una tarea de una enorme complejidad técnica. De hecho, es un problema que en varias instancias está todavía abierto a la investigación y a la mejora, aunque ya existen varios ejemplos bastante meritorios en ese sentido, de robots humanoides que imitan ciertas conductas y capacidades humanas. Un ejemplo conocido en este sentido, es el robot Asimo de Honda, que es capaz de marchar en dos pies, de subir y bajar escaleras y de otra serie de proezas de locomoción bípeda. Ejemplos famosos de androides de ciencia ficción Literatura:
Cine y televisión:
Anime y manga:
Videojuego:
Dibujo animado:
Tebeos
CYBORG
La palabra ciborg (del acrónimo en inglés cyborg: cyber (cibernético) + organism (organismo), (organismo cibernético) se utiliza para designar una criatura compuesta de elementos orgánicos y dispositivos mecánicos generalmente con la inte nción de mejorar las capacidades de la parte orgánica mediante el uso de tecnología artificial. El término lo acuñaron Manfred E. Clynes y Nathan S. Kline en 1960 para referirse a un ser humano mejorado que podría sobrevivir en entornos extraterrestres. Llegaron a esa idea después de pensar sobre la necesidad de una relación más íntima entre los humanos y las máquinas en un momento en que empezaba a trazarse la nueva frontera representada por la exploración del espacio. Diseñador de instrumentación fisiológica y de sistemas de procesamiento de datos, Clynes era el director científico del Laboratorio de simulación dinámica de Rockland State Hospital, en Nueva York. De acuerdo con algunas definiciones del término, la conexión física y metafísica de la humanidad con la tecnología, ya ha empezado a convertirnos en ciborgs. Por ejemplo, una persona a la que se le haya implantado un marcapasos podría considerarse un ciborg, puesto que sería incapaz de sobrevivir sin ese componente mecánico. A finales del siglo XX, la imagen del ciborg como ser que no es ni humano ni máquina, ni hombre ni mujer, fue recuperado por autoras ciberfeministas, como Donna Haraway en su Manifiesto Cyborg. El término se suele utilizar erróneamente en numerosos escritos al confundirlo con robot o androide.
Investigaciones Más allá del imaginario de la Ciencia ficción, Kevin Warwick es tal vez la figura más importante en el desarrollo de una verdadera unión entre el humano y la maquina. El 24 de agosto de 1998 Warwick llevó a cabo el experimento Cyborg 1.0, en el cual se le implantó debajo de la piel un chip RFID (usando exclusivamente anestesia local) con el cual fue capaz de controlar puertas, luces, calentadores y computadoras sólo con la señal emitida por el chip. Un segundo experimento, todavía mas importante, fue el Cyborg 2.0 (14/3/2004), en el cual un chip de mayor complejidad fue implantado en el sistema nervioso de Warwick por medio del cual se conectó a Internet en la Columbia university de Nueva York y logró mover un brazo robótico situado en la Reading University del Reino Unido. Además, se le implantó también a su esposa un microchip (con el objetivo de crear alguna clase de telepatía o empatía) permitiendo así la primer comunicación puramente electrónica entre dos sistemas nerviosos humanos. Luego de los experimentos no fue encontrado ninguna clase de daño o interferencia en el sistema nervioso, lo cual determinó su éxito.
HISTORIA DE LA ROBÓTICA
AUTOMATIZACIÓN Y ROBÓTICA
La historia de la automatización industrial está caracterizada por períodos de constantes innovaciones tecnológicas. Esto se debe a que las técnicas de automatización están muy ligadas a los sucesos económicos mundiales. El uso de robots industriales junto con los sistemas de diseño asistidos por computadora (CAD), y los sistemas de fabricación asistidos por computadora (CAM), son la última tendencia en automatización de los procesos de fabricación y luego se cargaN en el robot. Estas tecnologías conducen a la automatización industrial a otra transición, de alcances aún desconocidos.
Aunque el crecimiento del mercado de la industria Robótica ha sido lento en comparación con los primeros años de la década de los 80´s, de acuerdo a algunas predicciones, la industria de la robótica está en su infancia. Ya sea que éstas predicciones se realicen completamente, o no, es claro que la industria robótica, en una forma o en otra, permanecerá. En la actualidad el uso de los robots industriales está concentrado en operaciones muy simples, como tareas repetitivas que no requieren tanta precisión. En los 80´s las tareas relativamente simples como las máquinas de inspección, transferencia de materiales, pintado automotriz, y soldadura son económicamente viables para ser robotizadas. Los análisis de mercado en cuanto a fabricación predicen que en ésta década y en las posteriores los robots industriales incrementaran su campo de aplicación, esto debido a los avances tecnológicos en sensorica, los cuales permitirán tareas más sofisticadas como el ensamble de materiales. Como se ha observado, la automatización y la robótica son dos tecnologías estrechamente relacionadas. En un contexto industrial se puede definir la automatización como una tecnología que está relacionada con el empleo de sistemas mecánicos-eléctricos basados en computadoras para la operación y control de la producción. En consecuencia la robótica es una forma de automatización industrial.
Hay tres clases muy amplias de automatización industrial: automatización fija, automatización programable, y automatización flexible. La automatización fija se utiliza cuando el volumen de producción es muy alto, y por tanto se puede justificar económicamente el alto costo del diseño de equipo especializado para procesar el producto, con un rendimiento alto y tasas de producción elevadas. Además de esto, otro inconveniente de la automatización fija es su ciclo de vida que va de acuerdo a la vigencia del producto en el mercado. La automatización programable se emplea cuando el volumen de producción es relativamente bajo y hay una diversidad de producción a obtener. En este caso el equipo de producción es diseñado para adaptarse a la variaciones de configuración del producto; ésta adaptación se realiza por medio de un programa (Software). La automatización flexible, por su parte, es más adecuada para un rango de producción medio. Estos sistemas flexibles poseen características de la automatización fija y de la automatización programada. Los sistemas flexibles suelen estar constituidos por una serie de estaciones de trabajo interconectadas entre sí por sistemas de almacenamiento y manipulación de materiales, controlados en su conjunto por una computadora.
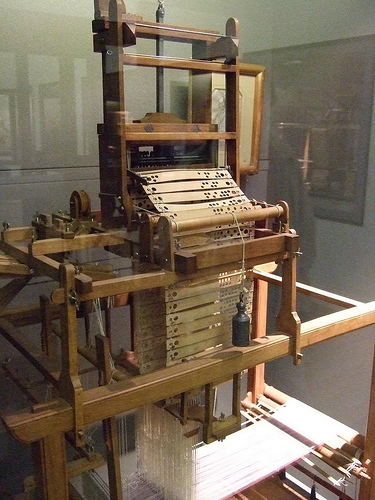
De los tres tipos de automatización, la robótica coincide más estrechamente con la automatización programable. En tiempos más recientes, el control numérico y la telequerica son dos tecnologías importantes en el desarrollo de la robótica. El control numérico (NC) se desarrolló para máquinas herramienta a finales de los años 40 y principios de los 50´s. Como su nombre indica, el control numérico implica el control de acciones de una máquina-herramienta por medio de números. Está basado en el trabajo original de Jhon Parsons, que concibió el empleo de tarjetas perforadas, que contienen datos de posiciones, para controlar los ejes de una máquina-herramienta. El campo de la telequerica abarca la utilización de un manipulador remoto controlado por un ser humano. A veces denominado teleoperador, el operador remoto es un dispositivo mecánico que traduce los movimientos del operador humano en movimientos correspondientes en una posición remota. A Goertz se le acredita el desarrollo de la telequerica. En 1948 construyó un mecanismo manipulador bilateral maestro-esclavo en el Argonne National Laboratory. El empleo más frecuente de los teleoperadores se encuentra en la manipulación de sustancias radiactivas, o peligrosas para el ser humano. La combinación del control numérico y la telequerica es la base que constituye al robot modelo. Hay dos individuos que merecen el reconocimiento de la confluencia de éstas dos tecnologías y el personal que podía ofrecer en las aplicaciones industriales. El primero fue un inventor británico llamado Cyril Walter Kenward, que solicitó una patente británica para un dispositivo robótico en marzo de 1954. La segunda persona citada es George C. Devol, inventor americano, al que deben atribuirse dos invenciones que llevaron al desarrollo de los robots hasta nuestros días. La primera invención consistía en un dispositivo para grabar magnéticamente señales eléctricas y reproducirlas para controlar una máquina. La segunda invención se denominaba Transferencia de Artículos Programada.
Un robot industrial es una máquina programable de uso general que tiene algunas características antropomórficas o ¨humanoides¨. Las características humanoides más típicas de los robots actuales es la de sus brazos móviles, los que se desplazarán por medio de secuencias de movimientos que son programados para la ejecución de tareas de utilidad. La definición oficial de un robot industrial se proporciona por la Robotics Industries Association (RIA), anteriormente el Robotics Institute of América. "Un robot industrial es un manipulador multifuncional reprogramable diseñado para desplazar materiales, piezas, herramientas o dispositivos especiales, mediante movimientos variables programados para la ejecución de una diversidad de tareas". Se espera en un futuro no muy lejano que la tecnología en robótica se desplace en una dirección que sea capaz de proporcionar a éstas máquinas capacidades más similares a las humanas.
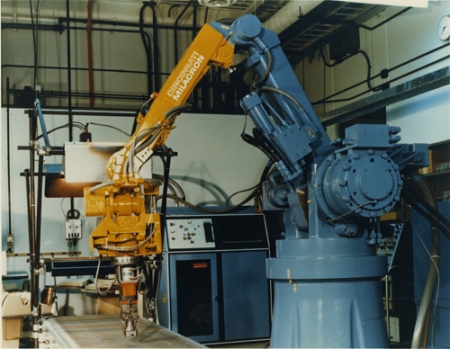
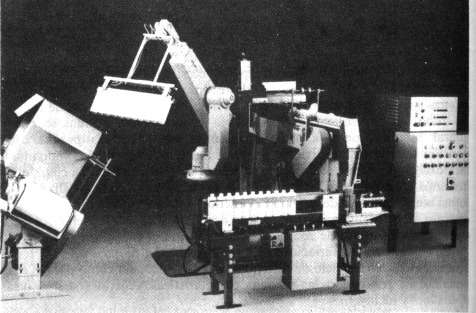
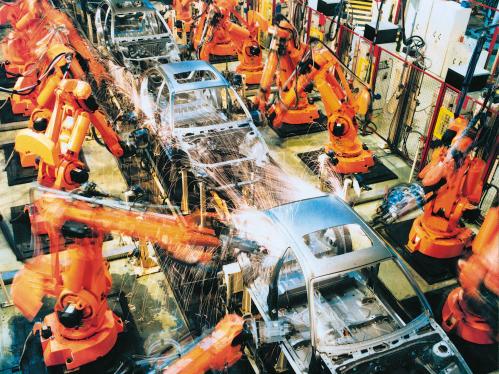
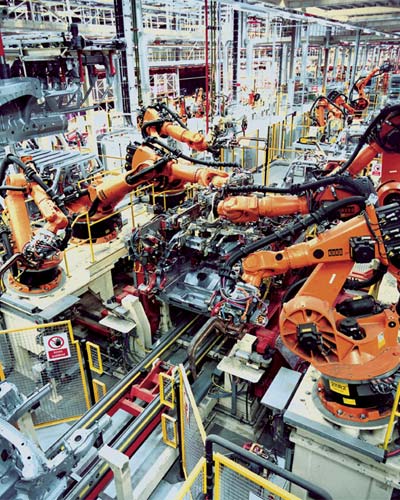
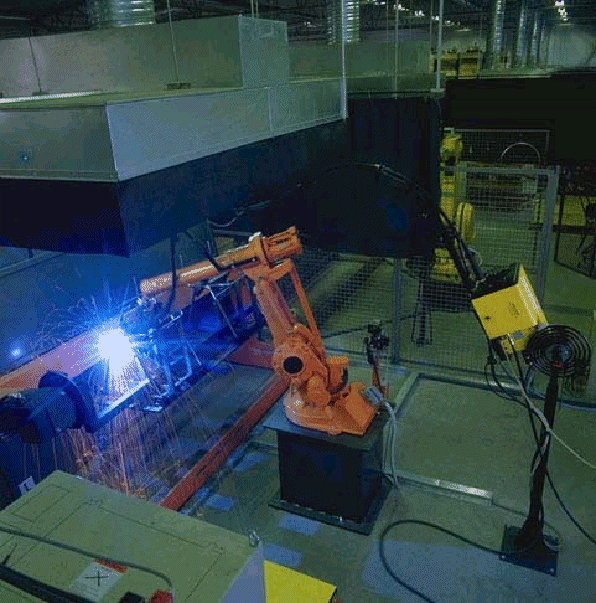
APLICACIONES DE LOS ROBOTS Los robots son utilizados en una diversidad de aplicaciones, desde robots tortugas en las clases, robots soldadores en la industria automotriz, hasta brazos teleoperados en el transbordador espacial. Cada robot lleva consigo su problemática propia y sus soluciones afines; no obstante que mucha gente considera que la automatización de procesos a través de robots está en sus inicios, es un hecho innegable que la introducción de la tecnología robótica en la industria, ya ha causado un gran impacto. En este sentido la industria automotriz desempeña un papel preponderante. Es necesario hacer mención de los problemas de tipo social, económicos e incluso político, que puede generar una mala orientación de robotización de la industria. Se hace indispensable que la planificación de los recursos humanos, tecnológicos y financieros se realice de una manera inteligente. Por el contrario la Robótica contribuirá en gran medida al incremento del empleo. ¿Pero, como se puede hacer esto? al automatizar los procesos en máquinas más flexibles, reduce el costo de maquinaria, y se produce una variedad de productos sin necesidad de realizar cambios importantes en la forma de fabricación de los mismo. Esto originara una gran cantidad de empresas familiares (Micro y pequeñas empresas ) lo que provoca la descentralización de la industria. 1. Industria Los robots son utilizados por una diversidad de procesos industriales como son: la soldadura de punto y soldadura de arco, pinturas de spray, transportación de materiales, molienda de materiales, moldeado en la industria plástica, máquinas-herramientas, y otras más. Aplicación de transferencia de material
Carga y descarga de maquinas.
Carga/Descarga de Máquinas. El robot carga una pieza de trabajo en bruto en el proceso y descarga una pieza acabada. Una operación de mecanizado es un ejemplo de este caso. Carga de máquinas. El robot debe de cargar la pieza de trabajo en bruto a los materiales en las máquinas, pero la pieza se extrae mediante algún otro medio. En una operación de prensado, el robot se puede programar para cargar láminas de metal en la prensa, pero las piezas acabadas se permite que caigan fuera de la prensa por gravedad. Descarga de máquinas. La máquina produce piezas acabadas a partir de materiales en bruto que se cargan directamente en la máquina sin la ayuda de robots. El robot descarga la pieza de la máquina. Ejemplos de ésta categoría incluyen aplicaciones de fundición de troquel y moldeado plástico. La aplicación se tipifica mejor mediante una célula de trabajo con el robot en el centro que consta de la máquina de producción, el robot y alguna forma de entrega de piezas.
Operaciones de procesamiento.
Por tanto la utilización de una herramienta para efectuar el trabajo es una característica distinta de este grupo de aplicaciones. El tipo de herramienta depende de la operación de procesamiento que se realiza. Soldadura por puntos. Como el término lo sugiere, la soldadura por puntos es un proceso en el que dos piezas de metal se soldan en puntos localizados al hacer pasar una gran corriente eléctrica a través de las piezas donde se efectúa la soldadura.
Soldadura por arco continua. La soldadura por arco es un proceso de soldadura continua en oposición a la soldadura por punto que podría llamarse un proceso discontinuo. La soldadura de arco continua se utiliza para obtener uniones largas o grandes uniones soldadas en las cuales, a menudo, se necesita una cierre hermético entre las dos piezas de metal que se van a unir. El proceso utiliza un electrodo en forma de barra o alambre de metal para suministrar la alta corriente eléctrica de 100 a 300 amperes.
Recubrimiento con spray La mayoría de los productos fabricados de materiales metálicos requieren de alguna forma de acabado de pintura antes de la entrega al cliente. La tecnología para aplicar estos acabados varia en la complejidad desde métodos manuales simples a técnicas automáticas altamente sofisticadas. Se dividen los métodos de recubrimiento industrial en dos categorías: 1.- Métodos de recubrimiento de flujo e inmersión. 2.- Métodos de recubrimiento al spray. Los métodos de recubrimiento mediante flujo de inmersión se suelen considerar que son métodos de aplicar pintura al producto de baja tecnología. La inmersión simplemente requiere sumergir la pieza o producto en un tanque de pintura liquida. Otras Operaciones de proceso Además de la soldadura por punto, la soldadura por arco, y el recubrimiento al spray existe una serie de otras aplicaciones de robots que utilizan alguna forma de herramienta especializada como efector final. Operaciones que están en ésta categoría incluyen: Taladro, acanalado, y otras aplicaciones de mecanizado. Rectificado, pulido, desbarbado, cepillado y operaciones similares. Remachado, Corte por chorro de agua. Taladro y corte por láser.
2. Laboratorios Los robots están encontrando un gran número de aplicaciones en los laboratorios. Llevan a cabo con efectividad tareas repetitivas como la colocación de tubos de pruebas dentro de los instrumentos de medición. En ésta etapa de su desarrollo los robots son utilizados para realizar procedimientos manuales automatizados. Un típico sistema de preparación de muestras consiste de un robot y una estación de laboratorio, la cual contiene balanzas, dispensarios, centrifugados, racks de tubos de pruebas, etc. Las muestras son movidas desde la estación de laboratorios por el robot bajo el control de procedimientos de un programa.
Los fabricantes de estos sistemas mencionan tener tres ventajas sobre la operación manual: incrementan la productividad, mejoran el control de calidad y reducen la exposición del ser humano a sustancias químicas nocivas. Las aplicaciones subsecuentes incluyen la medición del pH, viscosidad, y el porcentaje de sólidos en polímeros, preparación de plasma humano para muestras para ser examinadas, calor, flujo, peso y disolución de muestras para presentaciones espectromáticas.
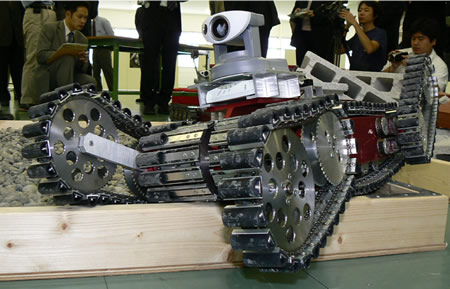
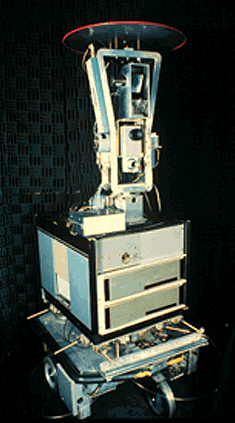
3. Manipuladores cinematicos La tecnología robótica encontró su primera aplicación en la industria nuclear con el desarrollo de teleoperadores para manejar material radiactivo. Los robots más recientes han sido utilizados para soldar a control remoto y la inspección de tuberías en áreas de alta radiación. El accidente en la planta nuclear de Three Mile Island en Pennsylvania en 1979 estimuló el desarrollo y aplicación de los robots en la industria nuclear. El reactor número 2 (TMI-2) predio su enfriamiento, y provocó la destrucción de la mayoría del reactor, y dejo grandes áreas del reactor contaminadas, inaccesible para el ser humano. Debido a los altos niveles de radiación las tareas de limpieza solo eran posibles por medios remotos. Varios robots y vehículos controlados remotamente han sido utilizados para tal fin en los lugares donde ha ocurrido una catástrofe de este tipo. Ésta clase de robots son equipados en su mayoría con sofisticados equipos para detectar niveles de radiación, cámaras, e incluso llegan a traer a bordo un mini-laboratorio para hacer pruebas.
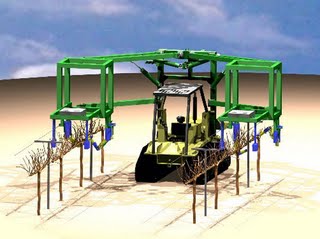
4. Agricultura Para muchos la idea de tener un robot agricultor es ciencia ficción, pero la realidad es muy diferente; o al menos así parece ser para el Instituto de Investigación Australiano, el cual ha invertido una gran cantidad de dinero y tiempo en el desarrollo de este tipo de robots. Entre sus proyectos se encuentra una máquina que esquila a la ovejas. La trayectoria del cortador sobre el cuerpo de las ovejas se planea con un modelo geométrico de la oveja. Para compensar el tamaño entre la oveja real y el modelo, se tiene un conjunto de sensores que registran la información de la respiración del animal como de su mismo tamaño, ésta es mandada a una computadora que realiza las compensaciones necesarias y modifica la trayectoria del cortador en tiempo real.
Debido a la escasez de trabajadores en los obradores, se desarrolla otro proyecto, que consiste en hacer un sistema automatizado de un obrador, el prototipo requiere un alto nivel de coordinación entre una cámara de vídeo y el efector final que realiza en menos de 30 segundos ocho cortes al cuerpo del cerdo. Por su parte en Francia se hacen aplicaciones de tipo experimental para incluir a los robots en la siembra, y poda de los viñedos, como en la pizca de la manzana.
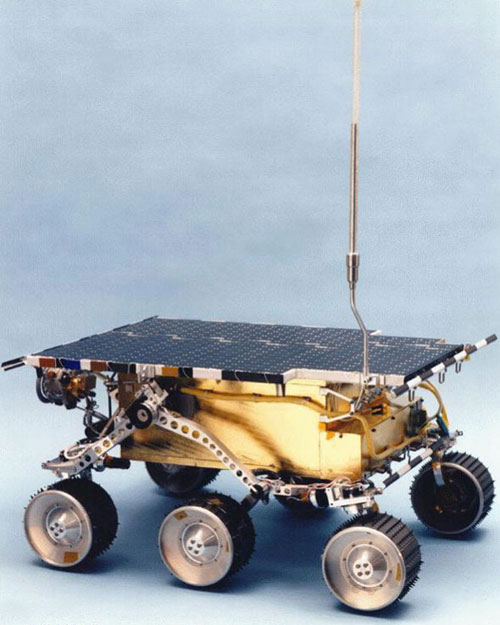
5. Espacio La exploración espacial posee problemas especiales para el uso de robots. El medio ambiente hostil para el ser humano, requiere de un equipo de protección muy costoso tanto en la Tierra como en el Espacio. Muchos científicos han hecho la sugerencia de que es necesario el uso de Robots para continuar con los avances en la exploración espacial; pero como todavía no se llega a un grado de automatización tan precisa para ésta aplicación, el ser humano aún no ha podido ser reemplazado por estos. Por su parte, son los teleoperadores los que han encontrado aplicación en los transbordadores espaciales. En Marzo de 1982 el transbordador Columbia fue el primero en utilizar este tipo de robots, aunque el ser humano participa en la realización del control de lazo cerrado.
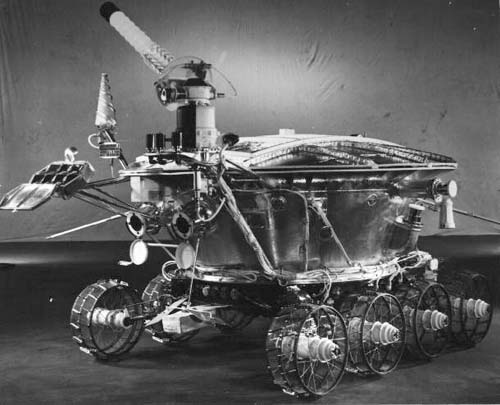
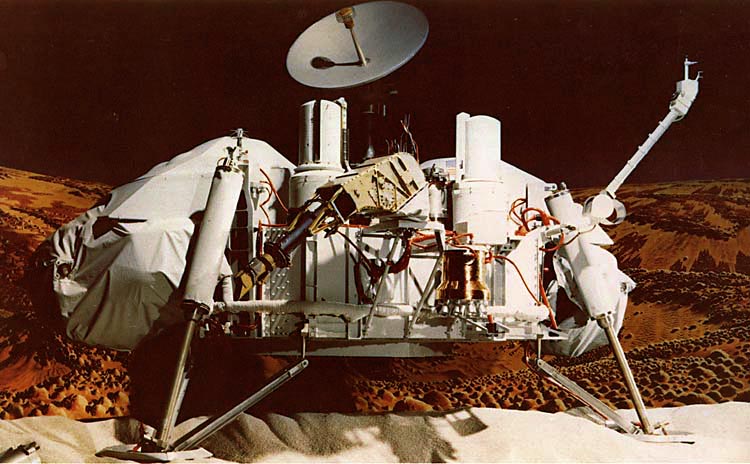
Algunas investigaciones están encaminadas al diseño, construcción y control de vehículos autónomos, los cuales llevarán a bordo complejos laboratorios y cámaras muy sofisticadas para la exploración de otros planetas. En Noviembre de 1970 los rusos consiguieron el alunizaje del Lunokhod 1, el cual poseía cámaras de televisión, sensores y un pequeño laboratorio, era controlado remotamente desde la tierra. En Julio de 1976, los norteamericanos aterrizaron en Marte el Viking 1, llevaba a bordo un brazo robotizado, el cual recogía muestras de piedra, tierra y otros elementos las cuales eran analizados en el laboratorio que fue acondicionado en el interior del robot. Por supuesto también contaba con un equipo muy sofisticado de cámaras de vídeo.
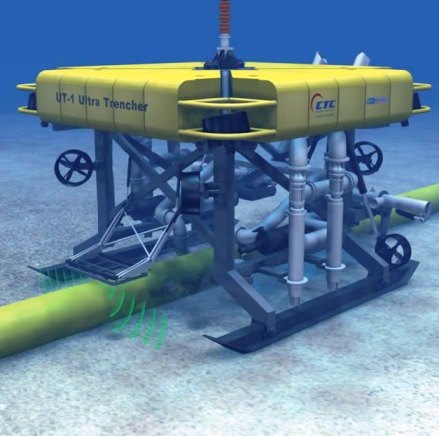
6. Vehículos submarinos Dos eventos durante el verano de 1985 provocaron el incremento por el interés de los vehículos submarinos. En el primero - Un avión de la Air Indian se estrelló en el Océano Atlántico cerca de las costas de Irlanda - un vehículo submarino guiado remotamente, normalmente utilizado para el tendido de cable, fue utilizado para encontrar y recobrar la caja negra del avión. El segundo fue el descubrimiento del Titanic en el fondo de un cañón, donde había permanecido después del choque con un iceberg en 1912, cuatro kilómetros abajo de la superficie. Un vehículo submarino fue utilizado para encontrar, explorar y filmar el hallazgo. En la actualidad muchos de estos vehículos submarinos se utilizan en la inspección y mantenimiento de tuberías que conducen petróleo, gas o aceite en las plataformas oceánicas; en el tendido e inspección del cableado para comunicaciones, para investigaciones geológicas y geofísicas en el suelo marino.
La tendencia hacia el estudio e investigación de este tipo de robots se incrementará a medida que la industria se interese aún más en la utilización de los robots, sobra mencionar los beneficios que se obtendrían si se consigue una tecnología segura para la exploración del suelo marino y la explotación del mismo.
7. Educación Los robots están apareciendo en las clases de tres distintas formas. Primero, los programas educacionales utilizan la simulación de control de robots como un medio de enseñanza. Un ejemplo palpable es la utilización del lenguaje de programación del robot Karel, el cual es un subconjunto de Pascal; este es utilizado por la introducción a la enseñanza de la programación. El segundo y de uso más común es el uso del robot tortuga en conjunción con el lenguaje LOGO para enseñar ciencias computacionales. LOGO fue creado con la intención de proporcionar al estudiante un medio natural y divertido en el aprendizaje de las matemáticas.
En tercer lugar está el uso de los robots en las clases. Una serie de manipuladores de bajo costo, robots móviles, y sistemas completos han sido desarrollados para su utilización en los laboratorios educacionales. Debido a su bajo costo muchos de estos sistemas no poseen una fiabilidad en su sistema mecánico, tienen poca exactitud, no existen los sensores y en su mayoría carecen de software.
LOS ROBOTS EN LA FICCIÓN Mitología Muchas mitologías antiguas tratan la idea de los humanos artificiales. En la mitología clásica, se dice que Cadmo sembró dientes de dragón que se convertían en soldados, y Galatea, la estatua de Pigmalión, cobró vida. También el dios griego de los herreros, Hefesto (Vulcano para los romanos) creó sirvientes mecánicos inteligentes, otros hechos de oro e incluso mesas que se podían mover por sí mismas. Algunos de estos autómatas ayudan al dios a forjar la armadura de Aquiles, según la Ilíada. Aunque, por supuesto, no se describe a esas máquinas como "robots" o como "androides", son en cualquier caso dispositivos mecánicos de apariencia humana.
Una leyenda hebrea habla del Golem, una estatua animada por la magia cabalística. Por su parte, las leyendas de los Inuit describen al Tupilaq (o Tupilak), que un mago puede crear para cazar y asesinar a un enemigo. Sin embargo, emplear un Tupilaq para este fin puede ser una espada de doble filo, ya que la víctima puede detener el ataque del Tupilaq y reprogramarlo con magia para que busque y destruya a su creador.
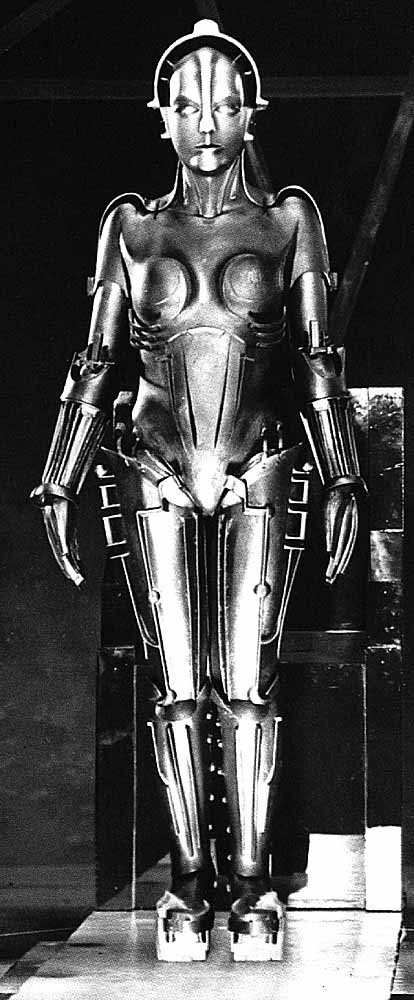
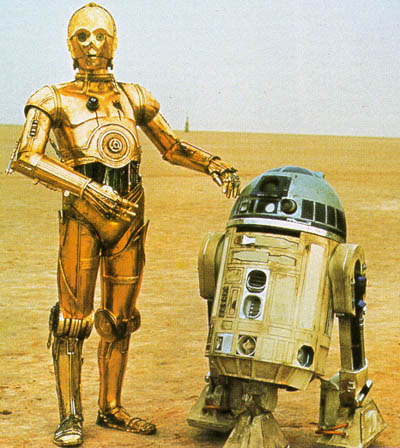
Literatura Ya en 1817, en un cuento de Hoffmann llamado El Coco, aparece una mujer que parecía una muñeca mecánica, y en la obra de Edward S. Ellis de 1865 El Hombre de Vapor de las Praderas se expresa la fascinación americana por la industrialización. Como se indicaba más arriba, la primera obra en utilizar la palabra robot fue la obra teatral R.U.R. de Čapek,(escrita en colaboración con su hermano Josef en 1920; representada por primera vez en 1921; escenificada en Nueva York en 1922. La edición en inglés se publicó en 1923). La obra comienza en una fábrica que construye personas artificiales llamadas robots, pero están más cerca del concepto moderno de androide o clon, en el sentido de que se trata de criaturas que pueden confundirse con humanos. Pueden pensar por sí mismos, aunque parecen felices de servir. En cuestión está si los robos están siendo explotados, así como las consecuencias por su tratamiento. El autor más prolífico de historias sobre robots fue Isaac Asimov (1920-1992), que colocó los robots y su interacción con la sociedad en el centro de muchos de sus libros. Este autor consideró seriamente la serie ideal de instrucciones que debería darse a los robots para reducir el peligro que éstos representaban para los humanos. Así llegó a formular sus Tres Leyes de la Robótica: 1) Ningún robot causará daño a un ser humano o permitirá, con su inacción, que un ser humano sufra daño; 2) todo robot obedecerá las órdenes que le den los seres humanos, a menos que esas órdenes entren en conflicto con la primera ley; y 3) todo robot debe proteger su propia existencia, siempre que esa protección no entre en conflicto con la primera o la segunda ley. Esas tres leyes se introdujeron por primera vez en su relato corto de 1942 Círculo Vicioso, aunque habían sido esbozadas en algunos textos anteriores. Más tarde, Asimov añadió la ley de Cero: "Ningún robot causará daño a la humanidad ni permitirá, con su inacción que la humanidad sufra daño". El resto de las leyes se modificaron para ajustarse a este añadido. Según el Oxford English Dictionary, el principio del relato breve ¡Mentiroso! de 1941 contiene el primer uso registrado de la palabra robótica. El autor no fue consciente de esto en un principio, y asumió que la palabra ya existía por su analogía con mecánica, hidráulica y otros términos similares que se refieren a ramas aplicadas del conocimiento. Cine y televisión El tono económico y filosófico iniciado por R.U.R. sería desarrollado más tarde por la película Metrópolis, y las populares Blade Runner (1982) o Terminator (1984). En televisión, existen series muy populares como Robot Wars y Battlebots, de batallas de estilo sumo entre robots. Película muy buena también podría nombrarse Inteligencia Artificial de Steven Spielberg. Una mención especial merecen las dos películas basadas en los relatos de Isaac Asimov, Yo, Robot y El hombre bicentenario, así como Cortocircuito y la versión de Disney Wall-E.
TÉRMINOS RELACIONADOS
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Actualizado el
25/11/2009 Eres
el visitante número
|