|
|
|
Real Academia
Logo de letraherido.com:
|
ELEMENTOS DE CARTOGRAFÍA
SISTEMA DE REFERENCIA CARTOGRAFICO REPRESENTACIÓN DE DATOS EN LOS MAPAS TÉCNICAS DE SIMBOLIZACIÓN CARTOGRÁFICA
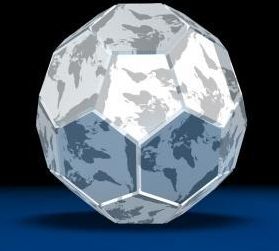
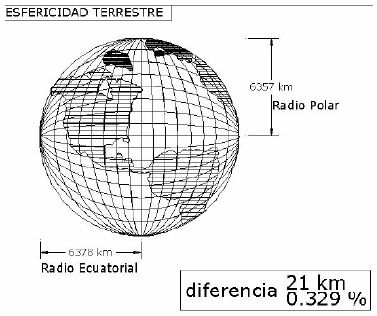
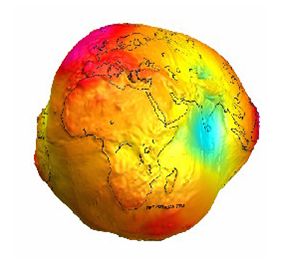
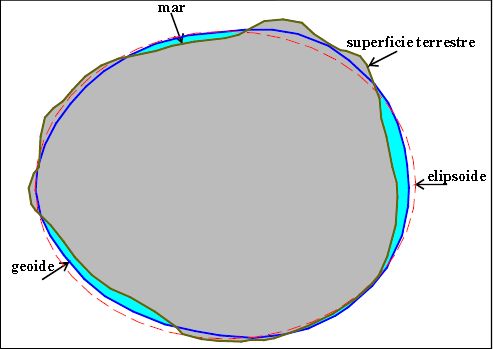
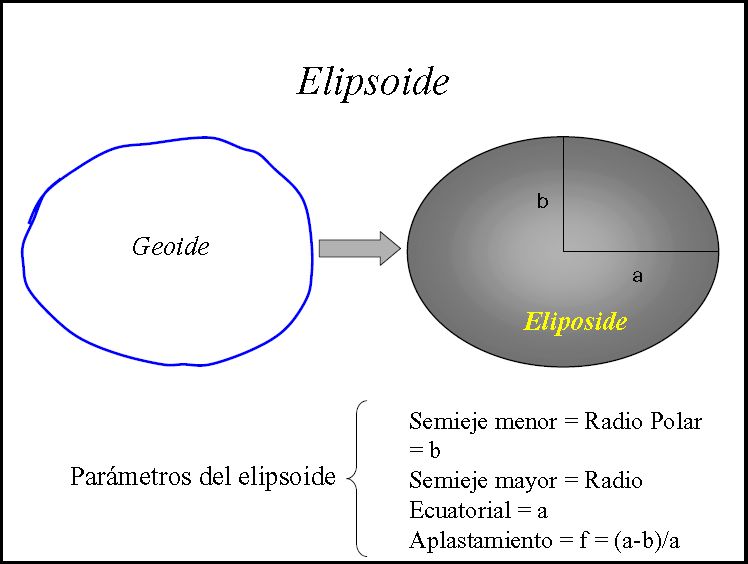
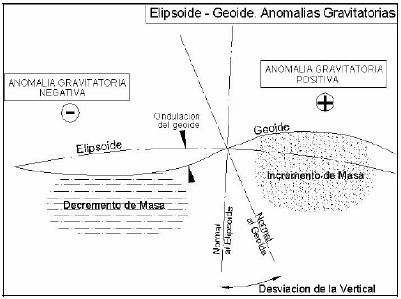
FORMA DE LA TIERRA Sabemos que la tierra no es plana y en cambio se representa sobre un plano, de manera que esta representación no puede estar exenta de distorsiones. La tierra tampoco es esférica, la representación matemática más aproximada es el GEOIDE, que es una superficie equipotencial que tiene en cuenta la fuerza de la gravedad (por la distribución de masas) y la fuerza centrifuga (por la rotación terrestre). Se le puede considerar como el nivel medio del mar. La superficie irregular de este geoide coincide con la que resultaría al prolongar por debajo de las superficies continentales, los mares y océanos en calma.
Para simplificar su estudio se asimila a un ELIPSOIDE de revolución. Aunque a lo largo de la historia de la cartografía se hayan definido muchos elipsoides, actualmente el más usado y oficial en España, es el de Hayford (Semieje mayor = 6378,388Km, semieje menor = 6356,909 Km. y DATUM en Postdam, Alemania)
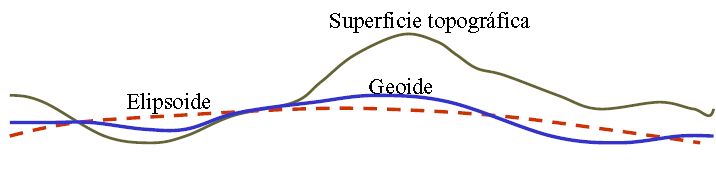
Podemos definir así varias superficies de referencia: - La superficie topográfica: es la superficie tangible a partir de la cual realizamos todas las mediciones. - Geoide: superficie de nivel (realidad física) - Elipsoide: superficie matemática apta para realizar cálculos geodésicos.
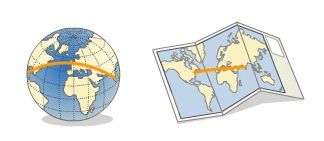
Llamamos PLANO, a la representación plana de una parte de la Tierra, en que por su limitada extensión puede considerarse como plana, es decir se prescinde de la curvatura terrestre. En cambio, si la zona a representar es lo suficientemente grande y no podemos despreciar la curvatura terrestre, a esa representación la llamamos MAPA. El efecto de la curvatura crea una mayor diferencia en altimetría que en planimetría. En 1Km el efecto altimétrico es de 7cm, mientras que planimétricamente es de tan solo 4mm. Además el error altimétrico crece rápidamente, así en 3Km, ya es de unos 60 cm.
SISTEMA DE REFERENCIA CARTOGRAFICO
Por observación astronómica podemos determinar la inclinación de la vertical en el espacio: la latitud. Combinando la observación astronómica y la medida del tiempo podemos determinar la longitud; la posición en el plano de rotación. También se puede determinar otra dirección (un azimut, esto es, un ángulo en el plano del horizonte): la dirección Norte–Sur, determinada por el eje de rotación terrestre (es la proyección de éste sobre el plano del horizonte). Esta dirección permite la orientación en el punto respecto a la tierra y es necesaria para relacionar otras posiciones con ésta. Éstas son las coordenadas astronómicas, referidas al geoide. Sin embargo no es factible el usar el geoide como superficie de referencia para la proyección sobre un plano debido a su forma irregular. Además el cálculo astronómico de precisión es complicado. Se necesita una superficie más simple.
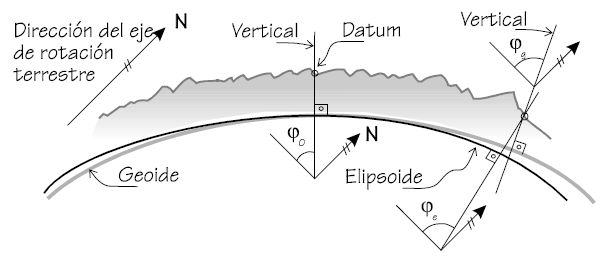
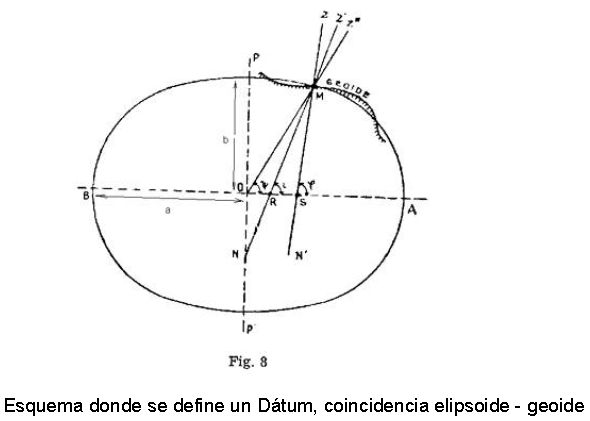
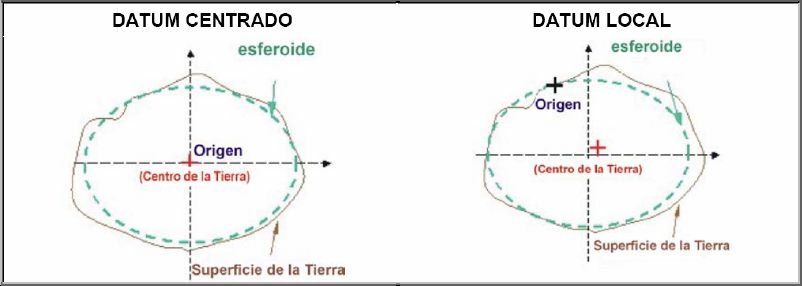
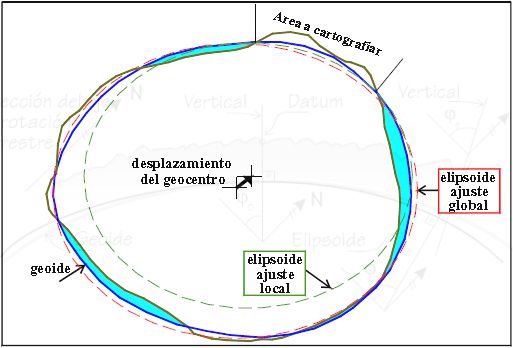
La figura que se suele adoptar para referir las coordenadas geográficas es el elipsoide de revolución por las razones explicadas antes. Esto entraña dos problemas previos: el ajuste del tamaño del elipsoide de referencia a utilizar y su posicionamiento. Al hacer esto se puede buscar una buena aproximación al geoide en una zona restringida de la tierra o bien de manera global. Por métodos topográficos, o actualmente por teledetección, se calcula el tamaño de un elipsoide que aproxime bien el geoide. Las dimensiones del elipsoide se pueden determinar por dos parámetros. Comúnmente éstos son dos de los siguientes: los semiejes mayor, a (ecuatorial) y menor, b (polar), el aplanamiento α y la excentricidad e (los elipsoides calculados en base a medidas de satélite se suelen definir por a, la constante gravitacional geocéntrica y un factor de forma dinámica). En cuanto a la posición hay dos métodos fundamentales, partiendo de la condición previa de que el eje de rotación de la tierra sea paralelo al eje menor del elipsoide. El método usado tradicionalmente consiste en determinar un punto fundamental, DATUM en el que el elipsoide se toma tangente al geoide. Por tanto, en éste punto las coordenadas astronómicas coinciden con las referidas al elipsoide. De ésta forma el elipsoide aproxima al geoide tanto mejor cuanto más cerca del datum nos hallemos. Es por tanto éste, un método local, válido con precisión únicamente para una zona restringida de la tierra. Actualmente, se están utilizando como referencia elipsoides centrados en el centro de masas de la tierra, consiguiendo una aproximación similar en toda la superficie terrestre. Para obtener buenos resultados un elipsoide geocéntrico debe ser calculado cuidadosamente para minimizar el error global. Esto se consigue combinando las mediciones terrestres con observaciones por satélite.
La forma habitual de determinar las coordenadas de un punto es enlazar por medios topográficos con una red geodésica. Todos los puntos de ésta se han calculado por triangulación y observaciones topográficas en relación al datum. El hecho de que se conozcan con precisión las coordenadas astronómicas y el azimut en el datum permite que se puedan calcular las coordenadas referidas al elipsoide. De esta forma se tiene que las coordenadas geodésicas están referidas a un sistema geodésico: elipsoide y datum. El mismo punto de la superficie terrestre tendrá distintas coordenadas en distintos sistemas, con una oscilación típica de 100 a 300m. Esto hace que el sistema geodésico sea de importancia en escalas superiores a 1:400.000.
Hemos hablado hasta ahora de dos coordenadas, que nos permiten localizar un punto sobre la superficie del geoide (coordenadas astronómicas) o del elipsoide (coordenadas geodésicas). Para localizar un punto arbitrario en el espacio es necesaria una tercera coordenada: la elevación o ALTITUD. Esta se mide de forma normal a la superficie de referencia (geoide o elipsoide), la cual sirve de nivel base. Así, los desniveles respecto al geoide se miden en la dirección vertical, aunque en rigor esto introduce un pequeño error, ya que la vertical solo coincide exactamente con la normal al geoide en los polos, ecuador y superficie del geoide, debido a que las superficies equipotenciales del campo gravitatorio–centrífugo no son paralelas.
Las elevaciones que encontramos en los mapas topográficos son habitualmente relativas al geoide. Para los cálculos de transformación de coordenadas, o para la localización tridimensional se requieren en cambio elevaciones sobre el elipsoide. La diferencia entre ambos valores no suele ser mayor de 50m cuando el elipsoide se ajusta localmente. Si el elipsoide no es de aproximación global, o nos encontramos alejados del datum, la diferencia entre geoide y elipsoide puede ser de más de 100m. Para transformar elevaciones se utiliza habitualmente una carta geoide-elipsoide que suele ser sencilla debido al reducido desnivel que debe representar, y por tanto puede ser gestionada eficazmente mediante una aplicación informática. En la leyenda de los mapas topográficos no se dice que las altitudes se midan sobre el geoide, sino que se señala que las altitudes se miden respecto al nivel medio de un punto del mar determinado; en la cartografía española este punto es Alicante. El geoide queda determinado al precisar un punto cualquiera de su superficie, que establece su “nivel”. Idealmente, en una tierra homogénea y uniformemente cubierta por el océano, la determinación del geoide sería única. El hecho de que haya porciones de tierra emergida, la profundidad de los mares sea variable, la compleja oscilación de las mareas, etc. hace que distintos mares o porciones del océano correspondan a distintos niveles. Así las altitudes de una red geodésica se referencian siempre al nivel medio del mar (medido mediante mareómetro o mareógrafo) en un punto fijo. Si se miden respecto al nivel de otro mar en otro lugar pueden aparecer discrepancias. Por ejemplo el nivel medio del mar en Santander parece estar ligeramente —unos 60 cm— por encima del nivel en Alicante.
Cuando se intenta trabajar con distintos conjuntos de datos es imprescindible el referenciarlos en un sistema geodésico común. Si las coordenadas de los datos se basan en sistemas diferentes se hace necesaria la transformación de las coordenadas de un sistema a otro. Este problema suele presentar dificultades en la práctica; hay que tener en cuenta que se trata de un problema tridimensional, debido a que las direcciones verticales en distintos sistemas de referencia no coinciden y por tanto sólo se podrá resolver con precisión y generalidad si se cuenta con coordenadas tridimensionales. Existen dos procedimientos fundamentales para efectuar la transformación. La primera forma es utilizar fórmulas de transformación “exacta” basadas en la geometría del problema. Estas fórmulas estarán parametrizadas por los datos que definen la relación entre sistemas de referencia: elipsoides utilizados y posición relativa de éstos. Si no se dispone de elevación altimétrica (lo cual es frecuente; si la hay estará habitualmente referida al geoide y no al elipsoide) podemos tomar 0 como elevación; el error resultante no será superior a 20cm. En caso de poderse utilizar este método tiene la ventaja de ser global: las formulas de transformación se pueden aplicar a puntos de toda la Tierra. De todas formas hay que tener en cuenta que la forma en que se han determinado tradicionalmente las coordenadas referidas a sistemas de referencia locales (mediante triangulación respecto a una red geodésica, ajustes por mínimos cuadrados) hace que la realizada se aparte de la situación geométrica ideal, y que incluso las transformaciones teóricamente globales sean válidas únicamente en regiones limitadas. El segundo procedimiento, más usado en la práctica, es ajustar una fórmula de transformación por medios numéricos (ajuste por mínimos cuadrados). Las fórmulas usadas en este problema suelen ser polinomios. Para el ajuste es necesario conocer las coordenadas en ambos sistemas de un buen número de puntos de control en el área de los datos a transformar. Éste es un método local, que funciona en un área restringida. Posiblemente se requiere trabajo de campo para determinar las coordenadas de los puntos de control, y si el área de trabajo es extensa puede ser necesario dividirla en partes y operar separadamente en cada una. El resultado es una aproximación, tanto mejor cuantos más puntos de control se utilicen, mejor distribuidos estén, más precisa sea la determinación de sus coordenadas y mayor sea el grado de los polinomios ajustados. Este método puede producir resultados aceptables aún cuando no se cuente con datos altimétricos, siempre y cuando el área de trabajo sea reducida y su desnivel no sea abrupto. Debido a que habitualmente los puntos de control para el ajuste son puntos de la superficie terrestre, las fórmulas darán buenos resultados aunque no se tomen en cuenta las elevaciones de los puntos a transformar, siempre que estos puntos se encuentren en la superficie o cerca de ella; en cierta medida las transformaciones incluyen la información del relieve. Una variante común de éste método es el ajuste por bloques: se calcula un desplazamiento de coordenadas para cada cuadrícula de una malla.
La red geodésica española se creó en base al elipsoide de Struve con datum en Madrid que sirvió por tanto de referencia al primitivo mapa topográfico nacional escala 1:50.000 del I.G.N. En 1924 se adoptó el elipsoide de Hayford 1909 como elipsoide internacional de referencia según acuerdo tomado por la Asociación Geodésica Internacional en asamblea celebrada en Madrid. En 1950 se definió el sistema ED50—European Datum 1950 basado en el elipsoide internacional con datum en Postdam, Alemania (torre de Helmert) como sistema de referencia. La red geodésica Española se recalculó en dicha referencia y la actual cartografía oficial se produce en base a ella (decreto 2303/1970 de 16 de julio). Por otro lado, en E.E.U.U. casi toda la cartografía existente se basa en NAD27—North American Datum 1927 con el elipsoide de Clarke de 1866 y datum en Meades Ranch en Kansas. El departamento de defensa estadounidense produjo por otra parte los sistemas WGS66 y WGS72—World Geodetic System 1966, 1972. La IUGG—International Union of Geodesy and Geophysics adoptó en 1980 el GRS80— Geodetic Reference System 1980, cuyo elipsoide se usa en el sistema NAD83, pensado para reemplazar al NAD27. Éste mismo elipsoide, diseñado como geocéntrico con datos de satélite y datos de campo, con pequeñas modificaciones sirve de base para el sistema WGS84, desarrollado por las agencias militares de EEUU. Éste sistema es el usado por el sistema GPS—Global Positioning System también desarrollado y mantenido por las mismas agencias.
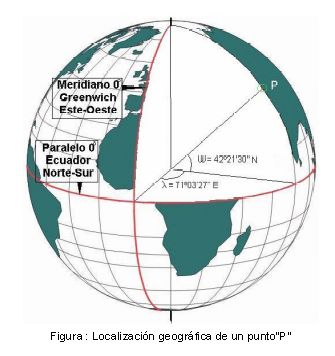
COORDENADAS GEOGRÁFICAS
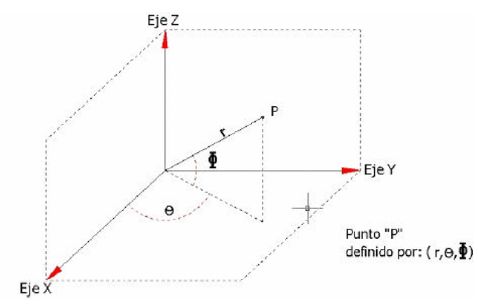
Las coordenadas geográficas son una forma de designar un punto sobre la superficie terrestre mediante la creación de un sistema de referencia de tres dimensiones.
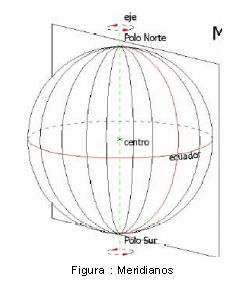
Se define el eje de la tierra como la recta ideal de giro del globo terráqueo en su movimiento de rotación. Es la recta que uno los dos polos geográficos: Norte y Sur.
El Sistema de Coordenadas geográficas determina todas las posiciones de la superficie terrestre utilizando las dos coordenadas angulares de un sistema de coordenadas esféricas que está alineado con el eje de rotación de la Tierra.
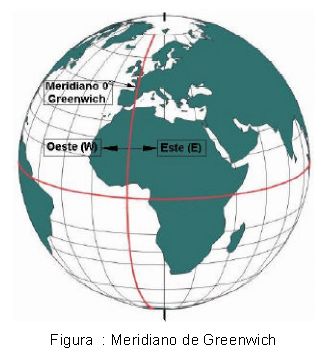
MERIDIANOS: son los círculos máximos de la esfera terrestre que pasan por los Polos (los meridianos son líneas imaginarias para determinar la hora, el año y demás) Por extensión, son también los círculos máximos que pasan por los polos de cualquier esfera o esferoide de referencia. Todos los observadores situados sobre el mismo meridiano ven al mismo tiempo, en la mitad iluminada de la Tierra, al Sol en lo más alto de su curso: El momento en que el Sol está en lo más alto de su curso nos indica el mediodía, es decir, la mitad del día. 1 En Astronomía el meridiano de referencia para las coordenadas ecuatoriales es el que pasa por el punto de Aries, mientras que el de referencia para las coordenadas horarias es el que pasa por el cenit y el nadir del lugar. El meridiano origen de referencias es el que pasa por Greenwich o Meridian Time (GMT), el meridiano 0°. El meridiano del lugar, meridiano local o meridiano, es aquel meridiano que pasa por el punto en el que se sitúa el observador. El eje de rotación terrestre divide al meridiano del lugar en dos semi-circunferencias:
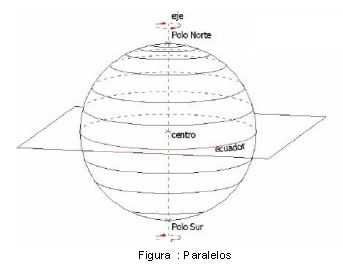
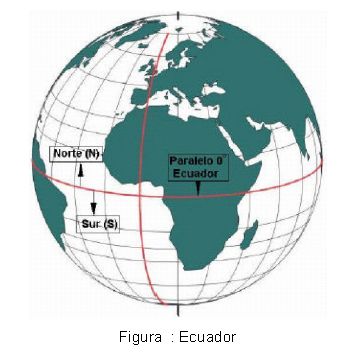
PARALELOS: es círculo formado por la intersección de la esfera terrestre con un plano imaginario perpendicular al eje de rotación de la Tierra. Sobre los paralelos, y a partir del meridiano que se toma como origen, el meridiano de Greenwich, se mide la longitud (arco de circunferencia expresado en grados sexagesimales), que podrá ser Este u Oeste, en función del sentido de medida de la misma. A diferencia de los meridianos, los paralelos no son circunferencias máximas pues, salvo el ecuador, no contienen el centro de la Tierra. El ángulo formado por un paralelo y la línea ecuatorial se denomina latitud, la cual se discrimina en Latitud Norte y Latitud Sur según el Hemisferio. Junto con los meridianos, forman el sistema de coordenadas geográficas basado en latitud y longitud. Existen cinco paralelos principales que se corresponden con una posición concreta de la Tierra en su órbita alrededor del Sol y que, por ello, reciben un nombre particular:
Estos ángulos son determinados por la oblicuidad de la eclíptica. El lapso durante el cual el Sol es visible varía a lo largo del año y varía según la latitud, alcanzando sus extremos de duración en las regiones polares.
LATITUD: mide el ángulo entre cualquier punto y el ecuador. Las líneas de latitud se llaman paralelos y son círculos paralelos al ecuador en la superficie de la Tierra.
La latitud es la distancia angular entre el ecuador y un punto determinado del planeta. La latitud se mide en grados (°), entre 0 y 90; y puede representarse de dos formas: · indicando a qué hemisferio pertenece la coordenada; · valores positivos -norte- y negativos -sur-; así, diez grados en latitud norte podría representarse 10°N o 10°; y diez grados sur podría ser 10°S o -10°. En la navegación marítima la latitud se representa con la letra griega φ.
LONGITUD: mide el ángulo a lo largo del ecuador desde cualquier punto de la Tierra. Se acepta que Greenwich en Londres es la longitud 0 en la mayoría de las sociedades modernas. Las líneas de longitud son círculos máximos que pasan por los polos y se llaman meridianos.
La longitud, en cartografía, expresa la distancia angular entre un punto dado de la superficie terrestre y el meridiano que se tome como 0°; habitualmente en la actualidad el meridiano de Greenwich (observatorio de Greenwich), pero antiguamente hubo muchos otros que servían como referencia (para el mapa de Ptolomeo el meridiano de Alejandría, para los mapas españoles hasta el siglo XIX el meridiano de Cádiz -observatorio de Cádiz- o el meridiano de Salamanca -observatorio de la Universidad de Salamanca, utilizado por la Compañía de Jesús-, para los franceses el meridiano de París -observatorio de París-, etc.). La longitud geográfica se mide en grados (°). Existen varias maneras de medirla y expresarla: · entre 0° y 360°, aumentando hacia el Este del meridiano 0°; · entre 0° y 180º indicando a qué hemisferio pertenece; · entre 0° y 180° positivos -Este- o negativos -Oeste-; así, noventa grados longitud este puede representarse 90° o 90°E; y noventa grados Oeste puede ser 270°, 90°O o -90° En navegación marítima la longitud se representa con la letra griega ω (omega).
Combinando estos dos ángulos, se puede expresar la posición de cualquier punto de la superficie de la Tierra. Por ejemplo, Baltimore, Maryland (en los Estados Unidos), tiene latitud 39,3 grados norte, y longitud 76,6 grados oeste. Así un vector dibujado desde el centro de la tierra al punto 39,3 grados norte del ecuador y 76,6 grados al oeste de Greenwich pasará por Baltimore.
Básicamente la localización geográfica de cualquier punto se puede realizar detallando uno de estos dos parámetros: - Coordenadas geográficas en parámetros Longitud-Latitud - Coordenadas (x,y) UTM (Universal Transversa Mercator), de las que hablaremos en el siguiente apartado.
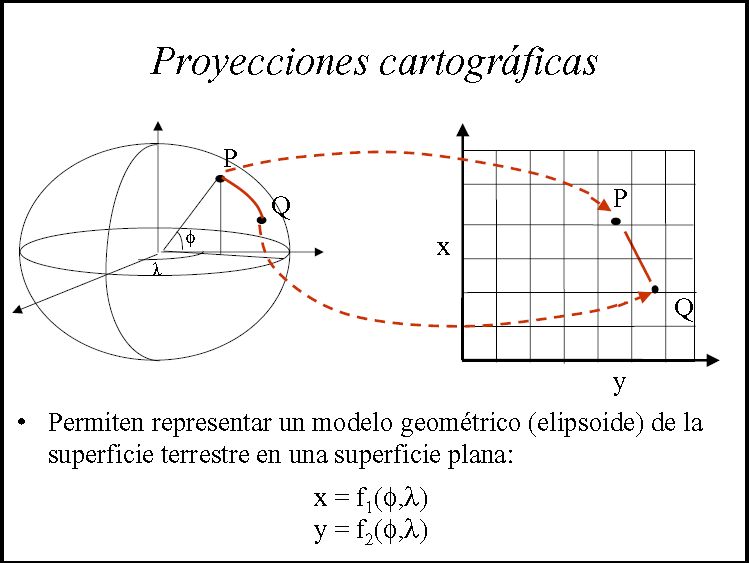
PROYECCIONES CARTOGRÁFICAS
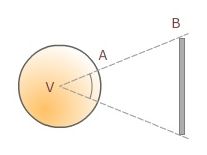
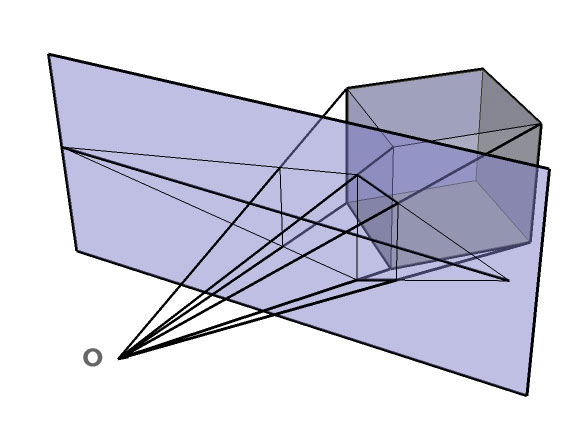
La proyección cartográfica o proyección geográfica es un sistema de representación gráfico que establece una relación ordenada entre los puntos de la superficie curva de la Tierra y los de una superficie plana (mapa). Estos puntos se localizan auxiliándose en una red de meridianos y paralelos, en forma de malla. Este método consiste en establecer una radiación de semirrectas a través de un punto, llamado vértice de proyección; se consigue así una correspondencia entre cada punto interceptado en la esfera y su homólogo en el plano cortado por la misma semirrecta.
La única forma de evitar las distorsiones de esta proyección sería usando un mapa esférico pero, en la mayoría de los casos, sería demasiado grande para que resultase útil. Las proyecciones tampoco evitan ciertas distorsiones que, según como se proyecten, pueden afectar a la forma, al área, a las distancias o a los ángulos de los elementos representados, y aquí surge otro aspecto importante de la cartografía: decidir qué proyección se va a utilizar para minimizar esas distorsiones.
Una buena proyección debe tener dos características, que conserve las áreas (equivalencia) y que conserve los ángulos (conformidad). Desgraciadamente no es posible tener ambas características a la vez, sería como hallar la cuadratura del círculo, por lo que hay que buscar soluciones intermedias. Cuando una proyección conserva los ángulos de los contornos se dice que es ortomórfica o conforme, pero estas proyecciones no conservan las áreas.
Tipos de proyecciones cartográficas: A. En función de las cualidades métricas En el paso de la esfera al plano resultará imposible conservar simultáneamente las propiedades geométricas: ángulos, superficies y distancias se verán distorsionadas. Las proyecciones cartográficas se pueden clasificar en función de la cualidad que conserven: Proyecciones conformes Una proyección cartográfica es conforme cuando mantiene los ángulos que forman dos líneas en la superficie terrestre. Este tipo de proyecciones se utilizan en cartas de navegación.
En la figura propuesta, el ángulo que forman las direcciones Polo sur-Madrid-Calcuta será igual tanto en la esfera como en el mapa si se realiza con una proyección conforme. Proyecciones equivalentes Una proyección cartográfica es equivalente cuando en el mapa se conservan las superficies del terreno, aunque las figuras dejen de ser semejantes. Se utilizan generalmente en mapas temáticos o parcelarios.
En la figura propuesta se observa que, al utilizar una proyección equivalente, la superficie del continente africano es igual en la esfera terrestre que la medida en el mapa, aunque su contorno pueda aparecer considerablemente deformado. Proyecciones equidistantes Una proyección cartográfica es equidistante cuando mantiene las distancias entre dos puntos situados en la superficie terrestre (distancia representada por el arco de círculo máximo que las une).
Por ejemplo, la distancia real de un vuelo Miami-Calcuta será igual a la equivalente que puede medirse directamente en un mapa creado con una proyección de tipo equidistante. Proyecciones afilácticas Una proyección cartográfica es afiláctica cuando no conserva ángulos, superficies ni distancias, pero las deformaciones son mínimas.
En conclusión, se debe seleccionar el tipo de proyección según el propósito del mapa. Si por ejemplo se requiere el cálculo y comparación de superficies, será necesario utilizar proyecciones de tipo equivalente. Si por el contrario, el objetivo del mapa es simplemente ubicar los países del mundo, y no se requiere rigor en las mediciones de áreas, pueden utilizarse las proyecciones conformes.
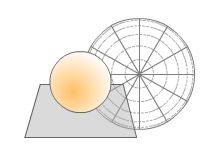
B. En función de las cualidades proyectivas Las proyecciones se pueden clasificar en función de la figura sobre la cual se proyecta: las que utilizan el plano o las que se desarrollan a través de una figura geométrica (cono o cilindro). Perspectivas o planas Se obtienen proyectando la superficie terrestre desde un punto llamado vértice de proyección sobre un plano tangente a un punto de la Tierra llamado centro de proyección.
La proyección mantiene sus propiedades geométricas alrededor del centro de proyección y las distorsiones aumentan conforme nos alejamos de dicho punto. El punto considerado como vértice de proyección puede encontrarse en el exterior, sobre la superficie o en el interior de la esfera. Además, el punto de tangencia puede ser cualquier punto de su superficie. De esta forma, la proyección plana admite dos clasificaciones: en función de la posición del vértice respecto a la esfera, y en función de la posición del plano tangente a la esfera.
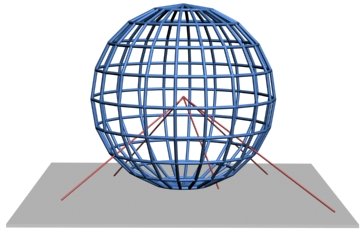
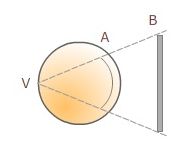
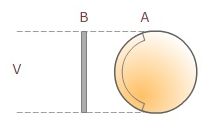
B.1. Según la posición del vértice respecto de la esfera El punto considerado como vértice de proyección puede encontrarse en el interior, sobre la superficie o en el exterior de la esfera. Proyección azimutal La proyección azimutal, o proyección cenital, es la que se consigue proyectando una porción de la Tierra sobre un disco plano tangente al globo en un punto seleccionado, obteniéndose la visión que se lograría ya sea desde el centro de la Tierra o desde un punto del espacio exterior. Se obtienen del reflejo la red de meridianos y paralelos con un foco de luz sobre un plano tangente a la Tierra. Si la proyección es del primer tipo se llama proyección gnomónica; si del segundo, ortográfica. Estas proyecciones ofrecen una mayor distorsión cuanto mayor sea a su vez la distancia al punto tangencial de la esfera y del plano. La proyección azimutal es una proyección geográfica que se caracteriza por tener simetría radial alrededor del punto central. Sólo consideramos tres casos naturales en que el foco de luz esté muy lejos, en el «infinito», que el foco de luz se sitúe en los antípodas y que el foco de luz se sitúe en el centro de la Tierra. Además, hay proyecciones matemáticas. Proyección Azimutal de Lambert La Proyección azimutal equivalente de Lambert conserva deliberadamente las áreas. No debe ser confundida con la Proyección Conforme Cónica de Lambert que es muy utilizada en Navegación Aerea. La proyección azimutal equivalente de Lambert no es conforme, es decir, no mantiene el valor real de los ángulos tras realizar la proyección. La escala disminuye a medida que nos acercamos al borde exterior, pero en menor medida que en la Proyección ortográfica. Este sistema es muy adecuado para trazar mapas de pequeña escala. Este sistema de proyección presenta como gran ventaja que las áreas representadas en los mapas no sufren deformación y son proporcionales a las formas originales, cumpliéndose la regla siguiente: "superficies iguales representan ángulos sólidos iguales".
Proyecciones gnomónicas En este tipo de proyecciones, el vértice coincide con el centro de la figura esférica que representa la Tierra, por lo tanto no es posible proyectar todo un hemisferio. Los círculos máximos (meridianos, ecuador y ortodrómicas) se representan como rectas. Además, al alejarse del centro de proyección, hay grandes deformaciones.
Se utiliza, generalmente, en cartas de navegación aérea y marítima, y para representar las zonas polares La proyección gnomónica es una proyección geográfica caracterizada por tener simetría radial alrededor del punto central. Se puede imaginar como la proyección de un foco de luz sobre un plano tangencial a la Tierra, en el que el foco de luz se sitúa en el centro de la Tierra. La escala aumentará rápidamente del centro al exterior. En esta proyección toda línea recta es un círculo máximo terrestre y el camino más corto entre dos puntos de la Tierra. Se usa en la navegación aeronáutica para trazar los rumbos verdaderos. Con este sistema no se puede representar un hemisferio completo. En la proyección polar todos los meridianos son líneas rectas y se disponen radialmente, en la proyección ecuatorial son líneas rectas el ecuador y los meridianos, que se disponen verticalmente, en la proyección oblicua son líneas rectas el ecuador y los meridianos.
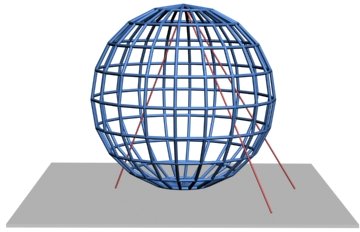
Proyecciones estereográficas En este caso el vértice de proyección está situado sobre la superficie de la esfera, y su punto diametralmente opuesto es el punto de tangencia del plano de proyección. La deformación aumenta simétricamente hacia el exterior a partir del punto central, mientras que meridianos y paralelos se representan como circunferencias.
La proyección estereográfica es adecuada para representar la totalidad de un hemisferio; por lo que se utiliza, principalmente, en la representación de las zonas polares, los mapamundis, así como en mapas de estrellas y geofísicos. En la proyección estereográfica consideramos que el foco de luz está en los antípodas. La superficie que puede representar es mayor que un hemisferio. El rasgo más característico es que la escala aumenta a medida que nos alejamos del centro. En su proyección polar los meridianos son líneas rectas. En la proyección ecuatorial sólo son líneas rectas el ecuador y el meridiano central. Esta es una de las proyecciones conformes que existen.
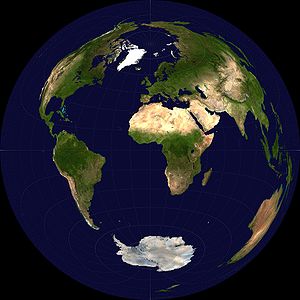
Proyecciones ortográficas En este tipo de proyecciones el vértice de proyección se encuentra a una distancia infinita de la esfera terrestre. La escala se conserva sólo en el centro, mientras que la deformación aumenta rápidamente al alejarse de éste.
Es un tipo de proyección muy antigua que sólo se usa para la realización de cartas astronómicas y para representar la apariencia de la Tierra desde el espacio. La proyección ortográfica es un sistema de representación gráfica, consistente en representar elementos geométricos o volúmenes en un plano, mediante proyección ortogonal; se obtiene de modo similar a la "sombra" generada por un "foco de luz" procede de una fuente muy lejana. Su aspecto es el de una fotografía de la Tierra.
· La proyección polar se caracteriza porque todos los meridianos son líneas rectas y la distancia entre paralelos disminuye según nos alejamos del centro. La distancia entre paralelos o meridianos depende de la escala así que cuando disminuye la distancia disminuye la escala y cuando aumenta la distancia aumenta la escala.
· La proyección ecuatorial se caracteriza porque los paralelos son líneas rectas. También es una línea recta el meridiano central. A medida que nos alejamos del centro la escala disminuye. Los meridianos tienen forma de arco.
· La proyección oblicua también se caracteriza por que los paralelos y los meridianos se acercan a medida que se alejan del centro.
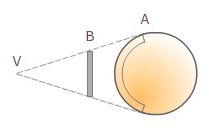
Proyecciones escenográficas El vértice de proyección es un punto cualquiera del espacio exterior a la esfera pero a una distancia finita de su centro.
Históricamente, las proyecciones escenográficas se han destinado a la realización de mapas celestes.
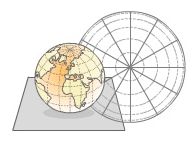
B.2. Según posición del plano tangente a la esfera El punto de tangencia puede ser cualquier punto de la superficie de la esfera. Proyecciones polares o ecuatoriales Las proyecciones polares también reciben el nombre de ecuatoriales, por ser su plano paralelo al del ecuador, y por tanto perpendicular al eje de la Tierra.
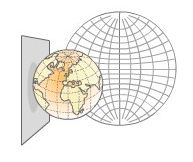
Los meridianos se representan por rectas concurrentes al centro de proyección (localizado en cualquiera de los polos) y conservando el valor de sus ángulos. En consecuencia, la escala de representación varía con la latitud. Proyecciones meridianas o transversas Las proyecciones meridianas se denominan también transversas, al ser el centro de proyección el punto de corte de cualquier meridiano con el ecuador.
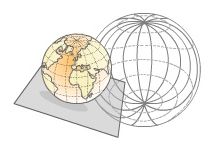
En este tipo de proyecciones, los meridianos se representan por rectas paralelas entre sí, desigualmente espaciadas, mientras que los paralelos se representan por hipérbolas. Proyecciones oblicuas u horizontales Las proyecciones oblicuas se denominan también horizontales, por ser paralelas al horizonte de un lugar. El centro de proyección está situado en un punto cualquiera que no se encuentre en el ecuador ni en ninguno de los polos.
En esta proyección, los paralelos quedan representados como curvas cónicas tales como parábolas, elipses e hipérbolas.
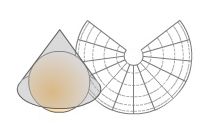
Desarrollos Este tipo de proyección se obtiene al considerar una figura geométrica auxiliar tangente o secante a la esfera que pueda convertirse después en un plano; es decir, que sea desarrollable. Las figuras auxiliares más utilizadas son el cono y el cilindro: Proyecciones cónicas: utilizan el cono como figura de proyección, tangente o secante a la esfera. El eje del cono coincide con la línea de los polos, estableciendo análogamente entre los puntos de la esfera y el cono una correspondencia biunívoca.
Al desarrollar el cono, se obtiene una representación en la que
los meridianos aparecen como rectas concurrentes al vértice del cono y forman
ángulos iguales entre sí, mientras que los paralelos son circunferencias
concéntricas cuyo centro es el vértice del cono. Es el sistema de representación que ayuda a reproducir, en un plano, las imágenes de modo más fiel, con un resultado muy similar a como lo percibimos las personas. Es el sistema empleado en la perspectiva cónica.
1. Proyección Cónica simple La proyección cónica simple puede tener uno o dos paralelos de referencia. 1.1. Si tiene un paralelo de referencia La malla de meridianos y paralelos se dibuja proyectándolos sobre el cono suponiendo un foco de luz que se encuentra en el centro del globo. El cono sí es una figura geométrica que pueda desarrollarse en un plano. El resultado es un mapa semicircular en el que los meridianos son líneas rectas dispuesta radialmente y los paralelos arcos de círculos concéntricos. La escala aumenta a medida que nos alejamos del paralelo de contacto entre el cono y la esfera. 1.2. Si tiene dos paralelos de referencia El cono secante corta el globo. A medida que nos alejamos de ellos la escala aumenta pero en la región comprendida entre los dos paralelos la escala disminuye. Esto es una representación de la tierra que muestra que la disposición de los paralelos es que puede tener uno o dos de diferencia 2. Proyección Conforme de Lambert La proyección conforme cónica de Lambert es una proyección cartográfica cónica que es frecuentemente usada en Navegación Aerea. No debe ser confundida con la Proyección Azimutal Equivalente de Lambert. En esencia, la proyección superpone un cono sobre la esfera de la Tierra, con dos paralelos de referencia secantes al globo e intersectándolo. Esto minimiza la distorsión proveniente proyectar una superficie tridimensional a una bidimensional. La distorsión es mínima a lo largo de los paralelos de referencia, y se incrementa fuera de los paralelos elegidos. Como el nombre lo indica, esta proyección es conforme. Los pilotos utilizan estas cartas debido a que una línea recta dibujada sobre una carta cuya proyección es conforme cónica de Lambert muestra la distancia verdadera entre puntos. Sin embargo, los aviones deben volar rutas que son arcos de círculos máximos para recorrer la distancia más corta entre dos puntos de la superficie, que en una carta de Lambert aparecerá como una línea curva que debe ser calculada en forma separada para asegurar de identificar los puntos intermedios correctos en la navegación. Sobre la base de la proyección Proyección cónica simple con dos meridianos de referencia Lambert ajustó matemáticamente la distancia ente paralelos para crear un mapa conforme. Como los meridianos son líneas rectas y los paralelos arcos de círculo concéntricos las diferentes hojas encajan perfectamente. 3. Proyección Cónica Múltiple Esta proyección consiste en utilizar no un cono, sino varios superpuestos. El resultado es un mapa dividido en franjas. El único meridiano que tendrá la misma escala es el central, que aparece como una línea recta. Los demás meridianos son curvas, y la escala aumenta con la distancia. También el ecuador es una línea recta, perpendicular al meridiano central. Los demás paralelos son arcos concéntricos. Esta proyección ni es conforme ni conserva las áreas, pero en la zona central las variaciones de escala son mínimas.
Proyecciones cilíndricas: utilizan el cilindro como figura de proyección, tangente o secante a la esfera. El eje del cilindro coincide con la línea de los polos, estableciendo análogamente entre los puntos de la esfera y el cilindro una correspondencia biunívoca.
Al desarrollar el cilindro, se obtiene una representación en la que los meridianos estarán representados por rectas paralelas equidistantes, y los paralelos por rectas perpendiculares a las anteriores que se van espaciando a medida que aumenta la latitud. Una proyección cilíndrica es una proyección geográfica que usa un cilindro tangente a la esfera terrestre, colocado de tal manera que el paralelo de contacto es el ecuador. La malla de meridianos y paralelos se dibuja proyectándolos sobre el cilindro suponiendo un foco de luz que se encuentra en el centro del globo. El cilindro sí es una figura geométrica que pueda desarrollarse en un plano. La más famosa es la proyección de Mercator que revolucionó la cartografía. En ella se proyecta el globo terrestre sobre un cilindro. Es una de las más utilizadas aun cuando por lo general en forma modificada, debido a las grandes distorsiones que ofrece en las zonas de latitud elevada, cosa que impide apreciar en sus verdaderas proporciones las regiones polares.
Ejemplos de esta proyección son la de Mercator y la de Peters. Proyección de Mercator: proyección geográfica tipo cilíndrica, inventada por Gerardus Mercator en 1569. Es famosa en todo el mundo y es muy utilizada en la navegación por la facilidad de trazar rutas de rumbo constante o loxodrómicas. La proyección se basa en el modelo ideal que trata a la tierra como un globo hinchable que se introduce en un cilindro y que empieza a inflarse ocupando el volumen del cilindro e imprimiendo el mapa en su interior. Este cilindro cortado longitudinalmente y ya desplegado sería el mapa con proyección de Mercator. Esta proyección presenta una buena exactitud en su zona central, pero las zonas superior e inferior correspondientes a norte y sur presentan grandes deformaciones. Los mapas con esta proyección se utilizaron en la época colonial con gran éxito. Su éxito se debe a la potencia de Europa de la época. Al ser Europa la potencia dominante que viajaba hacia el nuevo mundo por la zona central, no se comprobó la deformación que sufrían estos mapas. Posteriormente en la época de las exploraciones de Scott por el polo se comprobó que en dichas latitudes el mapa era casi inútil.
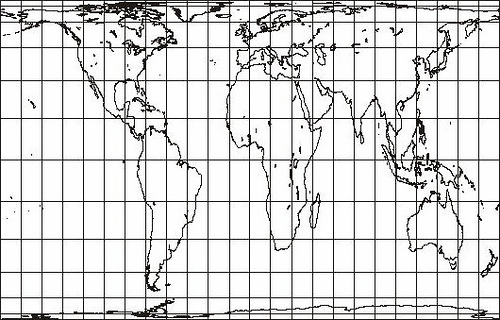
Proyección de Peters: llamada así por Arno Peters, aunque más correctamente Proyección de Gall-Peters es una proyección cartográfica que apareció por primera vez en 1855, publicada en el Scottish Geographical Magazine por James Gall. En ella los paralelos y los meridianos son sustituidos por una cuadrícula de 10 grados decimales. La proyección refleja correctamente las áreas de los países, por lo que es una proyección equiareal. Los meridianos aparecen como líneas verticales paralelas y los paralelos como líneas horizontales paralelas que van acortando la distancia entre ellas hacia los polos. Las formas de las áreas tropicales y subtropicales aparecen más estrechas y alargadas y las áreas de altas latitudes aparecen más ensanchadas y más achatadas que en otras proyecciones más habituales.
Otro grupo importante de proyecciones lo constituyen las diseñadas para poder representar la totalidad de la superficie terrestre sin incurrir en deformaciones excesivas, permitiendo representar fenómenos geográficos globales.
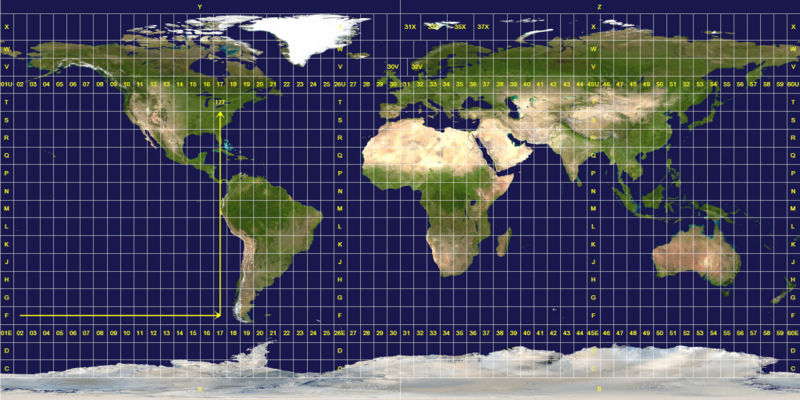
C. Proyecciones modificadas Son proyecciones que representan la superficie terrestre en su totalidad sin deformaciones excesivas. En la actualidad la mayoría de los mapas se hacen a base de proyecciones modificadas o combinadas -a veces con varios puntos focales a fin de corregir en lo posible las distorsiones en ciertas áreas seleccionadas- aún cuando se produzcan otras nuevas en lugares a los que se concede importancia secundaria, como son por lo general las grandes extensiones de mar. Las proyecciones modificadas son aquellas que tratan de representar fielmente la superficie de la Tierra, aún a costa de forzar las formas de las curvas e incluso de romper la continuidad del mapa. Todas ellas tratan de resolver la cuadratura del círculo, es decir, tratan del construir (matemáticamente) un cuadrado que abarque la misma superficie que un círculo. Sabemos que esto no es posible, pero algunas de las curvas usadas para trazar la red de meridianos y paralelos dan soluciones muy interesantes. Algunos ejemplos característicos de este tipo de proyecciones son los siguientes: Proyección UTM (Universal Transversa de Mercator): La UTM es una proyección cilíndrica conforme. El factor de escala en la dirección del paralelo y en la dirección del meridiano son iguales (h = k). Las líneas loxodrómicas se representan como líneas rectas sobre el plano (mapa). Los meridianos se proyectan sobre el plano con una separación proporcional a la del modelo, así hay equidistancia entre ellos. Sin embargo los paralelos se van separando a medida que nos alejamos del Ecuador, por lo que al llegar al polo las deformaciones serán infinitas. Es por ello que solo se representa la region entre los paralelos 84ºN y 80ºS. Además es una proyección compuesta; la esfera se representa en trozos, no entera. Para ello se divide la Tierra en husos de 6º de longitud cada uno. La proyección UTM tiene la ventaja de que ningún punto está alejado del meridiano central de su zona, por lo que las distorsiones son pequeñas. Pero esto se consigue al coste de la discontinuidad: un punto en el límite de la zona se proyecta en dos puntos distintos, salvo que se encuentre en el ecuador. Una línea que una dos puntos de entre zonas contiguas no es continua salvo que cruce por el ecuador. Para evitar estas discontinuidades, a veces se extienden las zonas, para que el meridiano tangente sea el mismo. Esto permite mapas continuos casi compatibles con los estándar. Sin embargo, en los límites de esas zonas, las distorsiones son mayores que en las zonas estándar. El Sistema de Coordenadas Universal Transversal de Mercator (En inglés Universal Transverse Mercator, UTM) es un sistema de coordenadas basado en la proyección geográfica transversa de Mercator, que se construye como la proyección de Mercator normal, pero en vez de hacerla tangente al Ecuador, se la hace tangente a un meridiano. A diferencia del sistema de coordenadas tradicional, expresadas en longitud y latitud, las magnitudes en el sistema UTM se expresan en metros únicamente al nivel del mar que es la base de la proyección del elipsoide de referencia. Husos UTM: Se divide la Tierra en 60 husos de 6º de longitud, la zona de proyección de la UTM se define entre los paralelos 80º S y 84º N. Cada huso se numera con un número entre el 1 y el 60, estando el primer huso limitado entre las longitudes 180° y 174° W y centrado en el meridiano 177º W. Cada huso tiene asignado un meridiano central, que es donde se sitúa el origen de coordenadas, junto con el ecuador. Los husos se numeran en orden ascendiente hacia el este. Por ejemplo, la Península Ibérica está situada en los husos 29, 30 y 31, y Canarias está situada en el huso 28. En el sistema de coordenadas geográfico las longitudes se representan tradicionalmente con valores que van desde los -180º hasta casi 180º (intervalo -180º → 0º → 180º); el valor de longitud 180º se corresponde con el valor -180º, pues ambos son el mismo antimeridiano de Greenwich y en él se produce la conexión de los husos UTM 1 y UTM 60. Zonas UTM: Se divide la Tierra en 20 zonas de 8º Grados de Latitud, que se denominan con letras desde la C hasta la X excluyendo las letras "I" y "O", por su parecido con los números uno (1) y cero (0), respectivamente. Puesto que es un sistema norteamericano (estadounidense), tampoco se utiliza la letra "Ñ". La zona C coincide con el intervalo de latitudes que va desde 80º S (o -80º latitud) hasta 72º S (o -72º latitud). Las zonas polares no están consideradas en este sistema de referencia. Para definir un punto en cualquiera de los polos, se usa el sistema de coordenadas UPS. Si una zona tiene una letra igual o mayor que la N, la zona está en el hemisferio norte, mientras que está en el sur si su letra es menor que la "N".
Notación: Cada cuadrícula UTM se define mediante el número del huso y la letra de la Zona, por ejemplo la ciudad española de Granada se encuentra en la cuadrícula 30S, y Logroño en la 30T. Excepciones: La rejilla es regular salvo en 2 zonas, ambas en el hemisferio norte; la primera es la zona 32V, que contiene el suroeste de Noruega; esta zona fue extendida para que abarcara también la costa occidental de este país, a costa de la zona 31V, que fue acortada. La segunda excepción se encuentra aún más al norte, en la zona que se conoce como Svalbard (ver mapa para notar las diferencias).
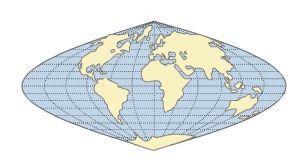
Proyección Sinusoidal Los paralelos son rectas horizontales equidistantes, el meridiano central es una recta perpendicular a ellas y los restantes meridianos son curvas. En esta proyección sólo son verdaderas las distancias a lo largo de todas las latitudes y el meridiano central. Es una proyección equivalente (conserva las áreas).
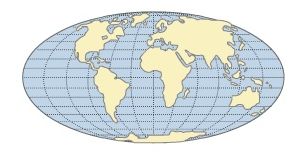
Se utiliza para representaciones donde las relaciones de latitud son significativas, al estar los paralelos uniformemente espaciados. Proyección de Mollweide La proyección de Mollweide, también llamada homalográfica (del griego «trazado uniforme») es un tipo de proyección cartográfica llamada así en honor a Karl Mollweide. Se dice que es pseudocilíndrica y de áreas iguales. El eje largo, el ecuador, tiene el doble de longitud que el eje corto, el meridiano central o tipo. El meridiano central es recto. Los meridianos a 90° son arcos circulares. Los paralelos son rectos pero desigualmente espaciados. La escala es verdadera sólo a lo largo de los paralelos estándar de 40:44N y 40:44S, por lo que tiene una mayor representación por la zona ecuatorial.
Se utiliza para distribuciones mundiales cuando el interés se concentra en latitudes medias.
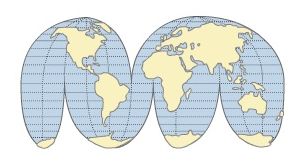
Proyección de Goode (homoloseana) Es una proyección discontinua en la que la Tierra se representa en partes irregulares unidas; de esta forma se mantiene la sensación de esfera y se consigue una distorsión mínima de las zonas continentales, pero con huecos en las superficies oceánicas.
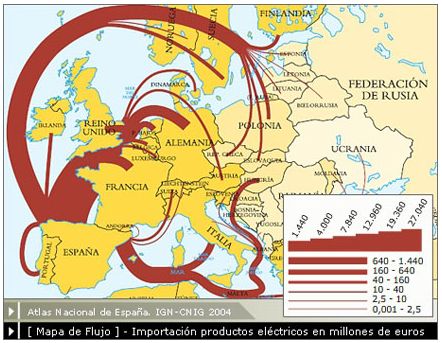
Es útil para la representación de datos en el mundo ya que su área es igual a la real. Se utiliza en los mapas de distribución de productos.
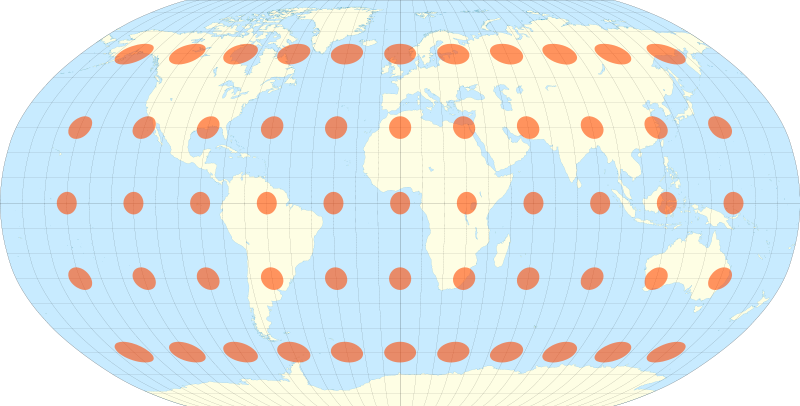
D. Proyecciones convencionales Las proyecciones convencionales generalmente fueron creadas para representar el mundo entero (mapamundi) y dan la idea de mantener las propiedades métricas, buscando un balance entre distorsiones, o simplemente hacer que el mapamundi "se vea bien". La mayor parte de este tipo de proyecciones distorsiona las formas en las regiones polares más que en el ecuador. Algunas de las más conocidas son las siguientes: Proyección de Robinson La Proyección de Robinson es una proyección cartográfica del mapamundi, que muestra el mundo entero de una vez. Fue creada específicamente con el objetivo de encontrar un buen consenso al problema de mostrar fácilmente el globo completo en una imagen plana. La proyección de Robinson es una realización de Arthur H. Robinson en 1961, y fue usada por Rand McNally desde la década de 1960 y por la National Geographic Society entre 1988 y 1998, siendo reemplazada por la proyección de Winkel-Tripel. Como muchas proyecciones, la de Robinson tiene ventajas, y como todas las proyecciones, también tiene desventajas. La proyección no es ni equiárea (o equivalente) ni conforme, abandonando ambas propiedades por un consenso. El creador pensó que ésto producía una mejor visión de la totalidad que la que se hubiese logrado respetando las propiedades anteriormente nombradas. Los meridianos se curvan suavemente, evitando extremos, pero al mismo tiempo estira los polos en largas líneas en vez de dejarlos como puntos. Por lo tanto la distorsión cercana a los polos es severa pero rápidamente pasa a niveles moderados a medida que nos alejamos de ellos. Los paralelos rectos implican una severa distorsión angular en las altas latitudes cerca de los márgenes del mapa, un problema inherente a todas las proyecciones seudocilíndricas. De todas formas, en el momento en que fue desarrollada, la proyección efectivamente consiguió el objetivo de Rand McNally de producir atractivas imágenes del mundo entero.
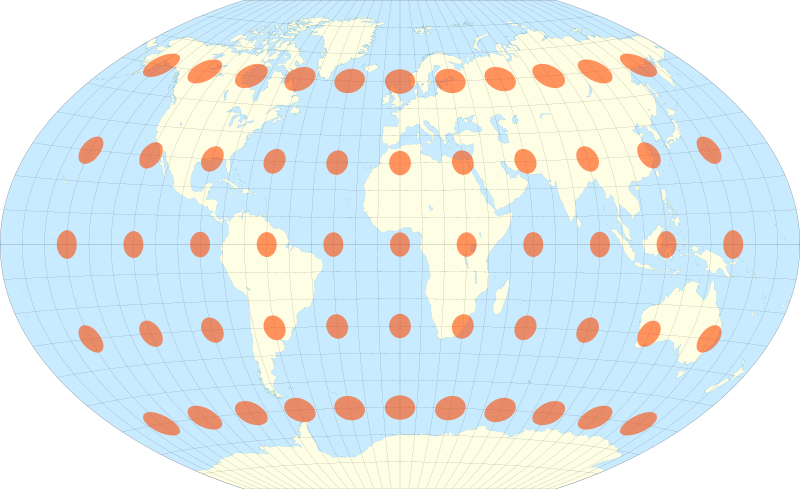
Proyección de Winkel-Tripel (Winkel III) es una proyección cartográfica azimutal modificada, una de tres proyecciones propuestas por Oswald Winkel en 1921. La proyección es la media aritmética entre la proyección cilíndrica equidistante y la proyección de Aitoff. Goldberg & Gott indican que podría decirse que la Winkel-Tripel es la mejor proyección conocida para representar el mundo entero, produciendo muy pequeños errores de distancia, pequeños errores de combinaciones de elipticidad y área, y la menor skewness que cualquier otro mapa. En 1998, la proyección de Winkel-Tripel reemplazó a la proyección de Robinson como proyección estándar para los mapamundis hechos por la National Geographic Society. Muchas instituciones educacionales y publicaciones siguieron el ejemplo de la National Geographic de adoptar la proyección.
ESCALAS, NORTE Y DIRECCIONES
A.ESCALA
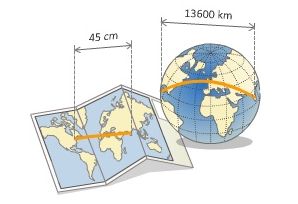
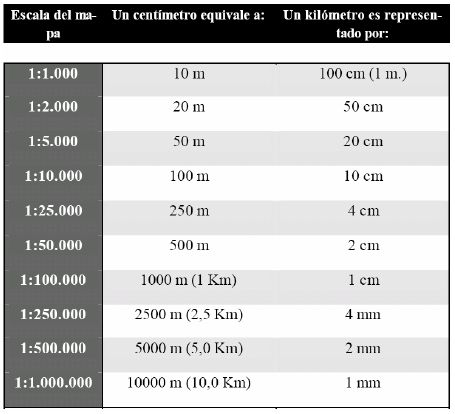
La escala es la relación matemática que existe entre las dimensiones reales y las del dibujo que representa la realidad sobre un plano o un mapa. Las escalas se escriben en forma de fracción donde el numerador indica el valor del plano y el denominador el valor de la realidad. Por ejemplo la escala 1:500, significa que 1 cm del plano equivale a 5 m en la realidad. · Ejemplos: 1:1, 1:10, 1:500, 5:1, 50:1 Si lo que se desea medir del dibujo es una superficie, habrá que tener en cuenta la relación de áreas de figuras semejantes, por ejemplo un cuadrado de 1cm de lado en el dibujo. Tipos de escalas
Según el tamaño físico del objeto representado: · Escala natural. Es cuando el tamaño físico del objeto representado en el plano coincide con la realidad. Existen varios formatos normalizados de planos para procurar que la mayoría de piezas que se mecanizan, estén dibujadas a escala natural, o sea, escala 1:1 · Escala de reducción. Se utiliza cuando el tamaño físico del plano es mayor que la realidad. Esta escala se utiliza mucho para representar piecerío (E.1:2 o E.1:5), planos de viviendas (E:1:50), o mapas físicos de territorios donde la reducción es mucho mayor y pueden ser escalas del orden de E.1:50.000 o E.1:100.000. Para conocer el valor real de una dimensión hay que multiplicar la medida del plano por el valor del denominador. · Escala de ampliación. Cuando hay que hacer el plano de piezas muy pequeñas o de detalles de un plano se utilizan la escala de ampliación. En este caso el valor del numerador es más alto que el valor del denominador o sea que se deberá dividir por el numerador para conocer el valor real de la pieza. Ejemplos de escalas de ampliación son: E.2:1 o E.10:1 Según la forma de presentación: · La escala numérica representa una relación entre el valor de la realidad (el número a la izquierda del símbolo ":") y el valor de la representación (el valor a la derecha del símbolo ":"). Un ejemplo de ello sería 1:100.000, lo que indica que 1 unidad representa 100.000 de las mismas unidades (cm, m, km, entre otras).
· La escala unidad por unidad o textual es la igualdad expresa de dos longitudes: la del mapa (a la izquierda del signo "=") y la de la realidad (a la derecha del signo "="). Un ejemplo de ello sería 1 cm = 4 km; 2cm = 500 m, etc.
· Finalmente la escala gráfica es la representación dibujada de la escala unidad por unidad, donde cada segmento muestra la relación entre la longitud de la representación y el de la realidad. Un ejemplo de ello sería: 0_________10 km
B. NORTE Y SUR El Polo Norte geográfico es uno de los dos lugares de la superficie de un planeta coincidente con el eje de rotación; es opuesto al Polo Sur. Todos los planetas y satélites poseen un polo Norte y otro Sur cuyo eje de rotación no suele ser perpendicular al eje de traslación. Así, los de la Tierra forman un ángulo de 23,5º y los de Urano 90º. POLO NORTE
El polo Norte geográfico terrestre está situado en el Océano Ártico, donde el mar está cubierto por un casquete de hielo o banquisa. Robert Peary fue el primer explorador que llegó al polo Norte, el 6 de abril de 1909, junto a su asistente Matthew Henson y cuatro esquimales. En 1895, el explorador noruego Fridtjof Nansen se acercó hasta 3 grados y 46 minutos del Polo Norte geográfico, pero no llegó. El 2 de agosto de 2007 dos batiscafos rusos "Mir" realizaron una inmersión en el Océano Glacial Ártico, en el Polo Norte, e instalaron en el fondo una bandera rusa, así como una cápsula con mensaje para generaciones venideras.
Aparte del geográfico se distinguen otros cinco polos: el magnético, el geomagnético, el Polo de Inaccesibilidad, el Polo Norte Celeste y el histórico. El Polo Norte geomagnético – es el punto de intersección de la superficie de la tierra con los ejes de un magneto bipolar simple, eso aproxima mejor el actual campo magnético terrestre.
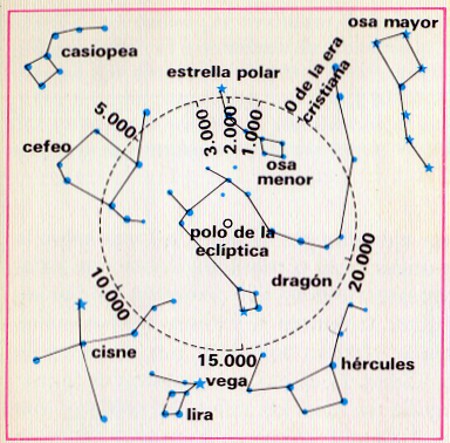
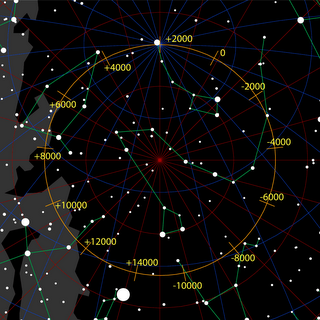
El Polo Norte de Inaccesibilidad ( El Polo Norte Celeste o astronómico. Por efecto de la precesión de los equinoccios, los polos celestes se desplazan con relación a las estrellas y, en consecuencia, la estrella polar en cada hemisferio no es la misma a través de los años. Actualmente, la estrella Polar en el hemisferio Norte es la situada en el extremo de la cola (alfa) de la Osa Menor por ser la más cercana al polo, del que dista menos de un grado, todavía se le irá acercando más y el año 2100 no distará de él más de 28'. A partir de, este momento, el polo se alejará de esta estrella la cual no volverá a ser la polar hasta unos 25 780 años después.
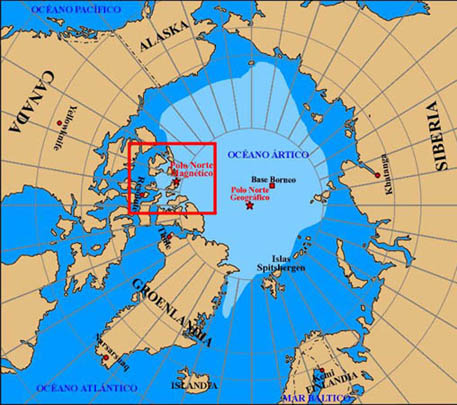
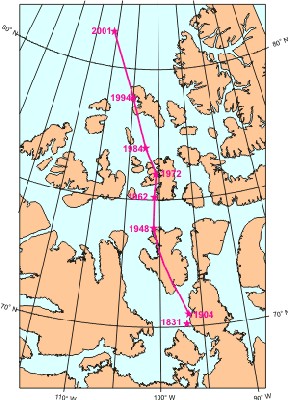
El Polo Norte magnético terrestre actualmente está situado a unos 1.600 km del polo Norte geográfico, cerca de la isla de Bathurst, en la parte septentrional de Canadá, en el territorio de Nunavut. Aunque magnéticamente hablando no es exactamente un polo norte sino un polo Sur usualmente es llamado así para no confundirlo al hablar de temas relacionados con la navegación ya que se usa para resaltar que se habla del Norte que marca la brújula y no el "real" que usualmente traen los mapas. Este lugar cambia continuamente a lo largo del tiempo a una velocidad variable (actual estimada en 40 km/año), y en otras ocasiones ha estado situado en el hemisferio sur debido a las inversiones periódicas del campo magnético terrestre (la última fue hace 780.000 años). Una brújula situada horizontalmente en este polo apuntaría a cualquier dirección y si se está suficientemente cerca tendría un error considerable ya que en la mayoría de las brújulas la aguja tendería apuntar hacia abajo.
Las brújulas no apuntan al polo Norte geográfico sino al polo Norte magnético, definido como el lugar donde el campo magnético es perpendicular a la superficie, por lo que en latitudes altas son bastante imprecisas.
POLO SUR
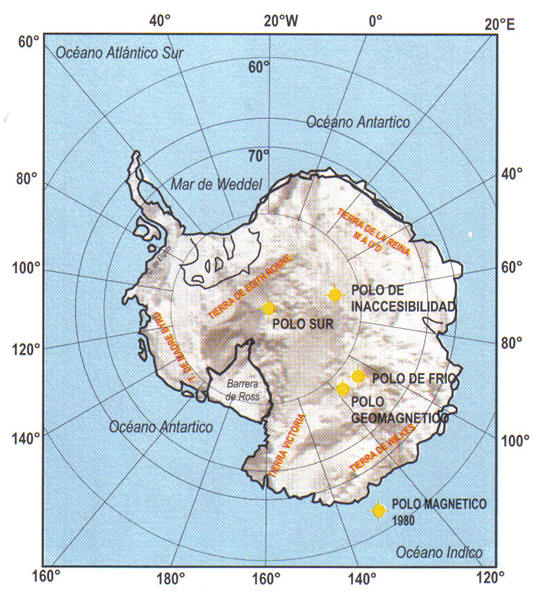
El término Polo Sur se refiere normalmente al Polo Sur Geográfico, el punto más austral de la superficie terrestre, el opuesto al Polo Norte. Otros "Polos Sur" incluyen el Polo Sur Ceremonial, el Polo Sur Magnético y Geomagnético, y el Polo Sur de Inaccesibilidad.
El Polo Sur Geográfico se localiza en el extremo austral de un planeta, equivalente a la latitud 90°S, donde convergen todos los meridianos. Es definido como uno de los dos puntos donde el eje de rotación de la Tierra intersecta con su superficie (el otro punto es el Polo Norte Geográfico). Sin embargo, el eje de rotación terrestre es susceptible a cambios, por lo que esta definición no es completamente precisa. El punto de proyección del Polo Sur Geográfico a la esfera celeste da lugar al polo celeste sur.
En la Tierra está situado sobre la Antártida, a aproximadamente 2.600 km del polo sur magnético. Está situado sobre una meseta llana, helada y ventosa a 2.835 m de altitud sobre el nivel del mar. Se estima que el espesor de la capa de hielo en el Polo Sur es de unos 2.700 m, con lo que el suelo de tierra estaría prácticamente a nivel del mar. El explorador noruego Roald Amundsen fue el primer hombre en llegar al lugar, el 14 de diciembre de 1911. La masa polar de hielo se mueve 10 metros por año, por lo que la posición exacta del Polo, relativa a la masa de hielo, cambia gradualmente con el tiempo. Un marcador del Polo Sur es reposicionado cada año para reflejar esto. Sin considerar las Islas Sandwich del Sur, el país más cercano al Polo Sur es Chile (3.718 km). La ciudad más próxima es Ushuaia, situada en Argentina (3.910 km) y el pueblo más cercano es Puerto Williams, Chile (3.895 km). La base de investigación científica Amundsen-Scott, de los Estados Unidos, se encuentra situada prácticamente en el Polo Sur geográfico (89° 59' 51" de latitud Sur, a unos 270 m). La distancia entre el Polo Norte y el Polo Sur geográficos (siguiendo la curvatura de la tierra) es de unos 20.000 km.
El Polo Sur Ceremonial es un área en la Base Amundsen-Scott. Consiste de una esfera metálica en un pedestal, rodeado de banderas de los firmados del Tratado Antártico. Se localiza a pocos metros del Polo Sur Geográfico, que está marcado solamente por una señal y una estaca. A razón de que la capa de hielo se mueve 10 metros por año, la estaca se cambia de lugar cada año en Año Nuevo.
El polo sur magnético se define como el lugar donde el campo magnético del planeta es perpendicular a la superficie, y es un sitio muy cercano al polo sur geomagnético y al polo sur geográfico, aunque en un sentido estrictamente magnético es un polo norte, hacia el cual apunta el polo sur de una brújula.
En la Tierra se ubicaba, en 2005, a Por razones históricas, el extremo de un magneto que apunta hacia el Polo Norte de la tierra es el "polo norte" del magneto, y el otro extremo es el "polo sur". Como los polos iguales no se atraen, el Polo Norte Magnético es, de hecho, un polo sur magnético, y el Polo Sur Magnético es, de hecho, un polo norte magnético. El 16 de enero de 1909, tres hombres, Douglas Mawson, Edgeworth David y Alistair Mackay, de una expedición dirigida por Sir Ernest Shackleton, aseguraron haber encontrado el Polo Sur Magnético. Sin embargo, hay duda de si su localización fue la correcta.
El campo geomagnético terrestre puede ser aproximado por un dipolo
inclinado, posicionado en el centro de la Tierra. El Polo Sur Geomagnético
es el punto donde el eje de este dipolo intersecta con la superficie de la
tierra en el hemisferio sur. En 2005 se calculó que estaba localizado a El Polo Sur de Inaccesibilidad es el punto del continente antártico que es más distante del Océano Antártico y el más complicado de acceder.
Se localiza a El Polo Sur de Inaccesibilidad es más remoto y complicado de acceder que el Polo Sur Geográfico. El 4 de diciembre de 2006, el Team N2i (Equipo N2i), se embarcó para lograr llegar sin asistencia mecánica. El equipo logró su cometido cuando cumplieron su expedición el 20 de enero de 2007.
El polo norte o sur de cuadrícula es la dirección respecto a la cual está alineada la cuadrícula de un mapa. Habitualmente el norte de cuadrícula coincide con el norte verdadero, y en la mayor parte de los casos la diferencia es tan pequeña que puede ser despreciada. El norte de la cuadrícula de la red UTM coincide con la del norte geográfico única y exclusivamente en el mismo meridiano principal de cada uno de los husos.
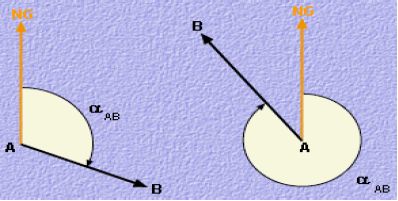
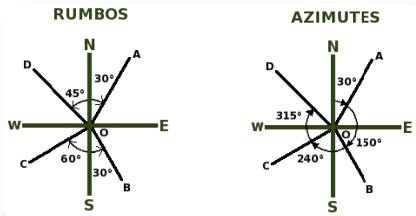
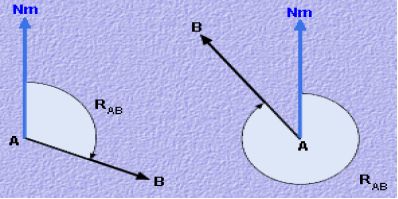
C. DIRECCIONES: AZIMUT, RUMBO Y ORIENTACIÓN AZIMUT En cartografía es el ángulo de una dirección contado en el sentido de las agujas del reloj a partir del norte geográfico. El acimut de un punto hacia el este es de 90 grados y hacia el oeste de 270 grados sexagesimales. El término acimut sólo se usa cuando se trata del norte geográfico.
Azimut de una dirección AB es el ángulo que se forma con respecto al Norte geográfico, en el sentido de las agujas del reloj. Cuando se empieza a contar a partir del norte magnético se suele denominar rumbo o acimut magnético. En geodesia o topografía geodésica el acimut sirve para determinar la orientación de un sistema de triangulación. En náutica, el azimut se mide desde el punto cardinal norte en sentido horario de 0° a 360° y se llama Acimut verdadero (Azv) o real. El acimut podrá ser magnético, si se mide respecto al norte magnético (Azm) o acimut compás (Azc) en inglés compass, si se mide desde el punto norte de la brújula. En el caso de las cartas de navegación aéreas, en las que se usa el acimut magnético, se le denomina rumbo. En astronomía azimut es el ángulo o longitud de arco medido sobre el horizonte celeste que forman el punto cardinal Norte (Sur) y la proyección vertical del astro sobre el horizonte del observador situado en alguna latitud Norte (Sur). Se mide en grados desde el punto cardinal en sentido de las agujas del reloj: Norte-Este-Sur-Oeste.
RUMBO Dirección considerada en el plano del horizonte, y principalmente cualquiera de las comprendidas en la rosa de los vientos. Precisamente la palabra procede del latín rhombus (rombo), que son las formas geométricas que unidas señalan las diferentes direcciones posibles en la rosa de los vientos.
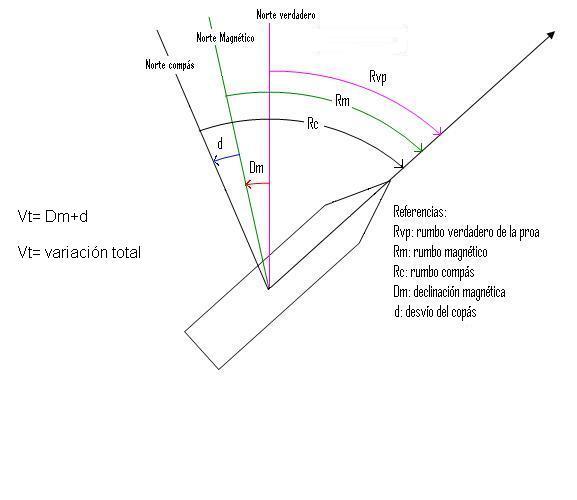
Rumbo es también la dirección en la que nos movemos o navegamos, o en la cual nos dirigimos o miramos y suele expresarse en forma del ángulo que forma esta dirección con otra tomada como referencia. Según que esta dirección de referencia sea el meridiano terrestre que pasa por la posición en la que nos encontramos o la dirección en que señala la brújula magnética hablaremos de rumbo magnético o de rumbo geográfico.
Rumbo de una dirección AB es el ángulo que se forma con respecto al Norte Magnético, en el sentido de las agujas del reloj. En navegación definimos como rumbo, al ángulo medido en el plano horizontal entre el norte y la dirección de avance (medido de 0º a 360º). Según sea el origen, distinguimos. Rumbo verdadero de la proa, (origen norte verdadero o geográfico), rumbo magnético (origen en el norte magnético) y rumbo compás (origen en el norte compás). Por convención, el rumbo se expresa siempre con tres dígitos. Si es necesario, se añaden ceros a la izquierda de las cifras significativas. Así, al decir rumbo = 028º se elimina la dualidad de interpretación y posibles errores cuando se le indica verbalmente al timonel (evitando así confusión con rumbo =128º o rumbo = 228º).
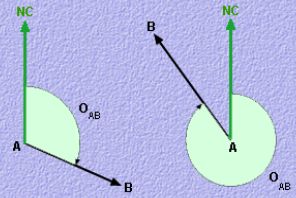
ORIENTACIÓN Orientación es el ángulo que forma el norte de la cuadrícula con la dirección AB, en el sentido de las agujas del reloj.
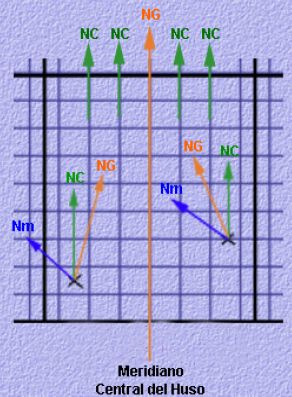
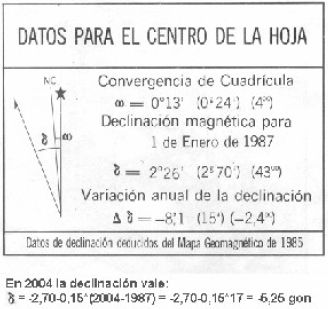
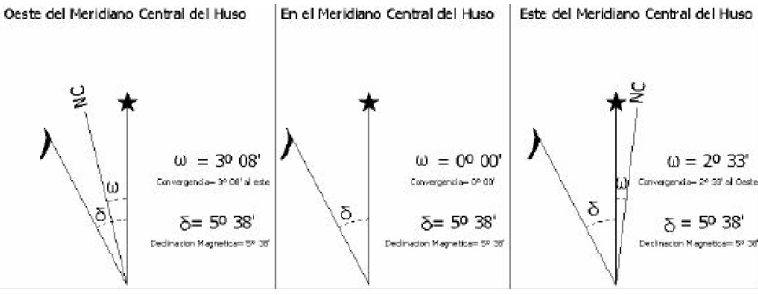
CONVERGENCIA-DECLINACIÓN En la cuadrícula solo existe una dirección, que coincide con el meridiano central en cada uso, que realmente se encuentra orientada al norte. En todas las demás habrá una deformación que variará según se encuentre a la derecha o a la izquierda del meridiano central.
En todos los mapas existe una dirección de referencia que normalmente hacemos coincidir con la del eje Y del sistema de coordenadas. En esta dirección se expresa la convergencia y la declinación de esa hoja.
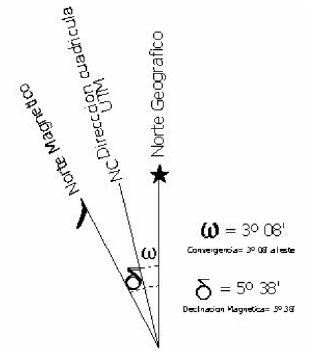
Convergencia Es el ángulo que forman la dirección norte de cuadrícula NC y la dirección al norte geográfico NG. Aumenta según nos alejamos del meridiano central de la faja, y se suele denominar con la letra griega omega ω. Esta convergencia de cuadrícula se encuentra designada para el punto central del mapa o carta, y dependiendo de la escala del plano se puede considerar prácticamente igual para toda la hoja. La valoración de la convergencia de cuadrícula ω se encuentra habitualmente asociada a la valoración de la declinación magnética de la hoja. Se pueden dar varios casos de convergencia de meridianos:
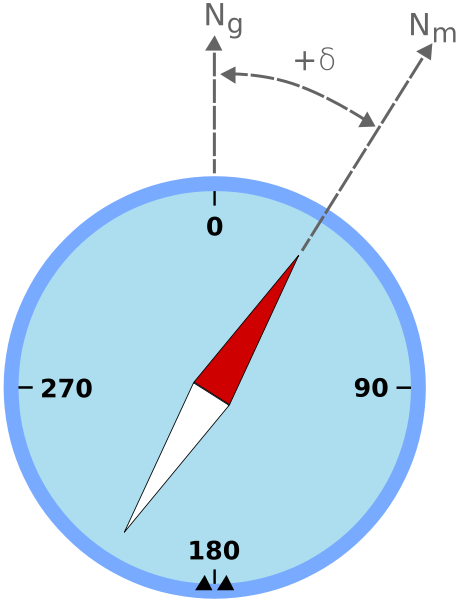
Declinación La declinación magnética en un punto de la tierra es el ángulo comprendido entre el norte magnético local y el norte verdadero. Se suele denominar con la letra griega delta δ. En otras palabras, es la diferencia entre el norte geográfico y el indicado por una brújula (el denominado también norte magnético). Por convención, la declinación es considerada de valor positivo cuando el norte magnético se encuentra al este del norte verdadero, y negativa si se encuentra al oeste.
El término variación magnética es equivalente al de declinación, y es empleado en algunas formas de navegación, entre ellas la aeronáutica. Las curvas de igual valor de declinación magnética se denominan curvas Isogónicas; entre ellas, aquellas que poseen un valor nulo se denominan curvas agónicas (una brújula ubicada en una posición comprendida en una curva agónica apuntará necesariamente al norte verdadero, ya que su declinación magnética es nula). La declinación magnética no es siempre de igual valor; depende del lugar en el que se ubique, llegando a variar sensiblemente de un lugar a otro. Por ejemplo, un viajero que se mueva desde la costa oeste de Estados Unidos a la costa Este puede sufrir una variación de la declinación magnética de cerca de veinte a treinta grados. El valor de la declinación magnética varía, además, a lo largo del tiempo. De esta forma, por ejemplo: una brújula colocada en el centro de Padua en 1796 no marca el mismo valor que si se coloca exactamente en el mismo sitio en la actualidad.
En la mayoría de los lugares la variación es debida al flujo interno del núcleo de la tierra. En algunos casos se debe a depósitos subterráneos de hierro o magnetita en la superficie terrestre, que contribuyen fuertemente a la declinación magnética. De forma similar, los cambios seculares en el flujo interno del núcleo terrestre hacen que haya un cambio en el valor de la declinación magnética a lo largo del tiempo en un mismo lugar. La declinación magnética en un área dada cambia muy lentamente dependiendo de lo alejado que se encuentre de los polos magnéticos, y puede llegar a mostrar una velocidad de cambio de entre 2 y 25 grados por cada cien años. Este cambio, que resulta insignificante para la mayoría de los viajeros, puede ser importante para los estudios de los viejos mapas.
ALTIMETRIA EN LOS MAPAS
Los mapas no sólo tratan de representar las posiciones relativas de los objetos en un plano. También pretenden mostrar una tercera dimensión: la altitud. En rigor no es lo mismo altitud que altura, y aunque normalmente se usa como sinónimo, no es correcto. La altitud es la distancia vertical entre un punto dado y otro punto considerado como nivel cero, que es el nivel medio del mar. La altura, por el contrario es la elevación de un punto con respecto a otro cualquiera de referencia cualquiera; esté a nivel del mar o no, y no siempre tiene porqué ser el mismo. Es decir, un avión vuela a determinada altitud (con respecto al nivel del mar) y a una altura, que puede ser mucho menor si está atravesando una cordillera.
El nivel del mar no es uniforme en todo el planeta, y además cambia ostensiblemente con las mareas. La referencia es el nivel medio del mar en un lugar concreto. Cada país tiene su estación donde medir este nivel y sirve de referencia para todo el país. Por ejemplo, en España la referencia es el nivel medio del mar en Alicante. Instrumentos como el GPS determinan la altitud en función de un modelo matemático de la Tierra, por lo que, normalmente, suele haber diferencias con la altimetría oficial.
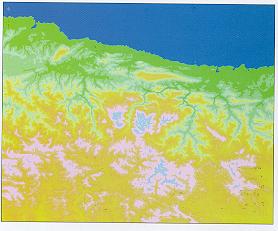
Dependiendo de la escala del mapa la altimetría se representa de diversas formas. En los mapas de escalas pequeñas, que representan países, regiones del mundo o continentes, al altimetría está representada, grosso modo, por colores. La altimetría en los mapas de pequeña escala se hace en falso color. Una de las más populares es la que va del verde la amarillo, del amarillo al marrón, del marrón al violeta, y del violeta al blanco. Usa un verde oliva muy oscuro para aquellas altitudes que estando en tierra se encuentran por debajo del mar. En los mapas de escala muy pequeña los tramos altimétricos suelen ser irregulares: por ejemplo del 0 al 200, del 200 al 400, del 400 al 1000, del 1000 al 1500, del 1500 al 2000, y a partir de aquí de mil en mil hasta más de 6000. Las isohipsas por debajo del nivel del mar (batimetría) se representan en azul, desde un azul casi blanco a azules más intensos dependiendo de la profundidad. El primer tramo suele ir de 0 a 200, el segundo de 200 a 1000, y a partir de ahí de mil en mil. No obstante, la leyenda de cuál es la referencia altimétrica debe aparecer en alguna parte de los márgenes del mapa. Esta escala de colores suele aparecer, también, en las ortoimágenes hechas con datos de satélite, la mayoría de ellas presentadas en falso color.
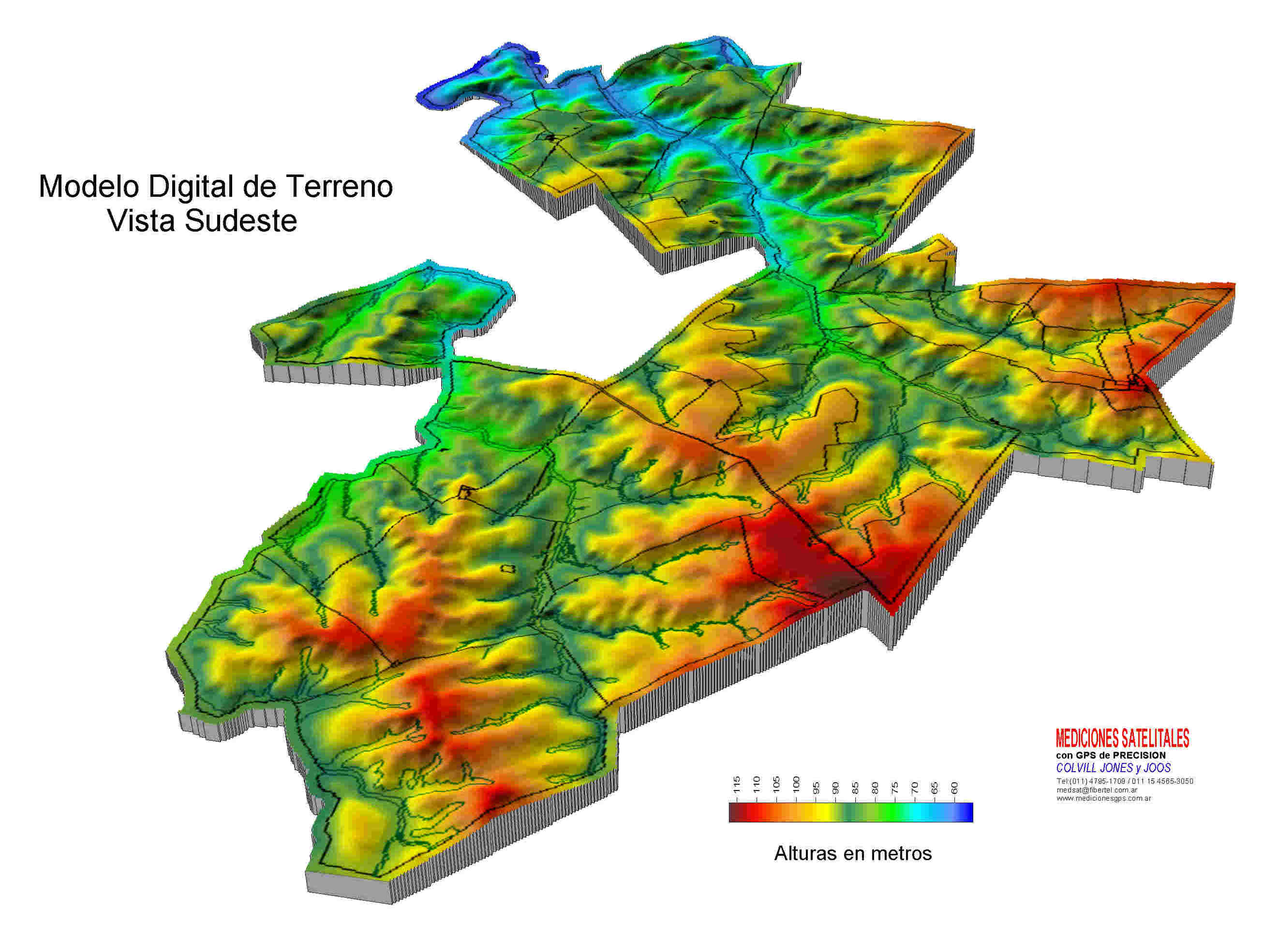
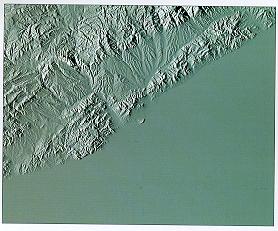
Normalmente no se usan colores planos, y se sombrean para dar sensación de relieve a las montañas. Debido a que leemos de izquierda a derecha el sombreado suele encontrarse al sur y sureste, lo que en el hemisferio norte es una falsedad, ya que el sol ilumina desde el sur dejando en sombra las laderas del norte. Pero hay que tener en cuenta que se trata de una convención. También se usan otros métodos para represar altitudes, como la altimetría de sombreado, en la que se simula el relieve del terreno mediante un juego de luces y sombras, o la perspectiva en tres dimensiones.
En los mapas de escalas más grandes la representación de la altitud tiene otra solución: la curvas de nivel. La curva de nivel une todos los puntos que tienen la misma altitud. Mapas a partir de escalas por encima de 1:200.000 ya tienen curvas de nivel para representar la altitud, aunque suelen estar mezclados con una altimetría de colores o del sombreado de las montañas.
La diferencia de altitud entre dos curvas de nivel consecutivas se llama equidistancia. Dependiendo de la escala de los mapas la equidistancia es diferente. Las escalas de 1:200.000 y 1:100.000 tienen equidistancias de 100 metros, o de 50 metros, pero el mapa topográfico básico, el 1:50.000, tiene equidistancias de 20 metros, y el 1:25.000 de 10 metros. Cada cuatro curvas, es decir cada 100 metros en el 1:50.000, encontraremos una curva de nivel más gruesa, son las curvas maestras. Sobre las curvas maestras hay un número que indica su altitud. La cima siempre está en el interior de la curva de nivel más pequeña. En algunas de estas cimas aparece un punto y un número, el punto es la cota más alta y el número es su altitud. En las zonas muy llanas pueden aparecer curvas de nivel auxiliares, que tiene una equidistancia intermedia y se dibujan con líneas de trazos. Entre dos puntos del mapa podremos determinar si ascendemos o descendemos porque conocemos nuestra altitud, y la curva maestra hacia la que nos dirigimos nos indica si está más alta o más baja. Por cada curva de nivel que atravesemos la diferencia de altura es la equidistancia. En algunos mapas podemos ver unas curvas de nivel con unas pestañas. Indican una pequeña depresión, es decir, que aunque el resto de las curva de nivel indiquen que ascendemos, esa indica que se desciende. La depresión está en la dirección que marcan las pestañas. Como las curvas de nivel indican la diferencia de altura, no de longitud, los metros de desnivel pueden salvarse en centenares de metros lineales, o en unos pocos metros. Así, cuanto más cerca estén las curvas de nivel mayor será el desnivel total a superar, y por lo tanto más pendiente es la ladera. Las curvas de nivel muestran un dibujo característico en algunos elementos del paisaje. Toman forma de v en los valles, son cerradas en las cumbres, se vuelven estrechas y alargadas en las crestas, se acercan y se separan bruscamente en los pasos de puertos, etc.
REPRESENTACIÓN DE DATOS EN LOS MAPAS
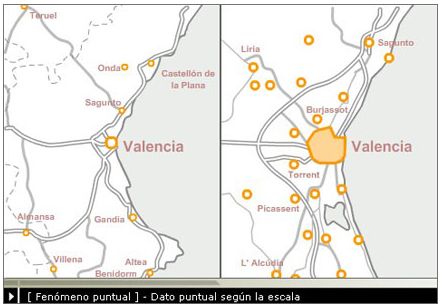
Para representar un objeto cualquiera o un fenómeno geográfico en un mapa es fundamental conocer las características de este dato que contempla los tres aspectos siguientes: dimensiones, nivel de medida y distribución. El análisis de las características de los datos permite elegir la simbología más adecuada para representar los fenómenos geográficos. DIMENSIONES Por su extensión, los fenómenos que se representan en un mapa pueden clasificarse en: puntuales, lineales, superficiales, volumétricos y espacio-temporales. Fenómenos puntuales La información aparece concentrada en un punto concreto (vértice geodésico, puente, manantial, mina, estación, etc.)
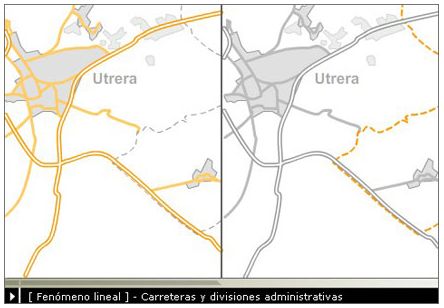
Fenómenos lineales La información discurre a lo largo de una línea, que puede existir en el terreno (ríos, carreteras, ferrocarriles) o no (línea de término municipal, red de meridianos y paralelos, etc.).
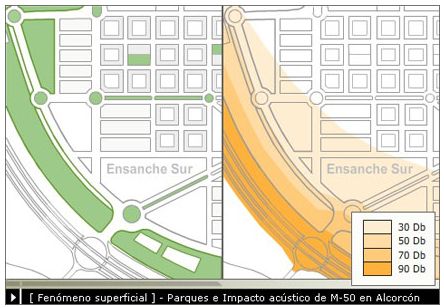
Fenómenos superficiales La información es bidimensional, y se ha de tener en cuenta la extensión del área del fenómeno (cuencas de ríos, tipos de suelos, Parques Nacionales, etc.). Aunque a veces el fenómeno se extiende tridimensionalmente se representa como un fenómeno superficial.
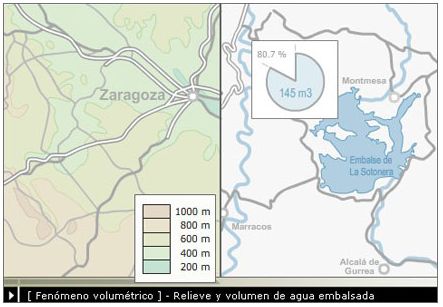
Fenómenos volumétricos La información tiene tres dimensiones espaciales. Estos datos pueden abarcar desde una construcción mental (población de una ciudad en cuanto a cantidad de habitantes) o pueden ser tangibles (volumen de agua embalsada, volumen de lluvia caída sobre un área, etc.). El ejemplo clásico y más evidente es el relieve.
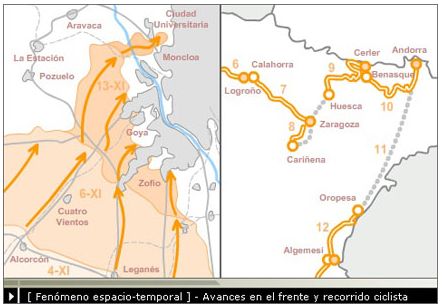
Fenómenos espacio-temporales La información depende del movimiento del fenómeno con respecto al paso del tiempo (migraciones de aves, expansión de una civilización,etc.).
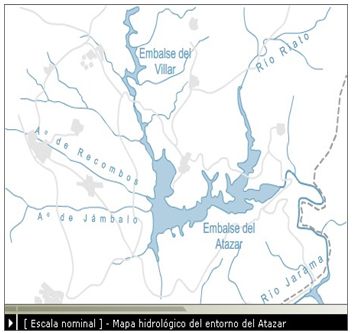
NIVEL DE MEDIDA Los elementos de la naturaleza se miden con el fin de clasificarlos y compararlos, lo que no siempre indica una magnitud numérica. En orden creciente de precisión, las escalas de medida de los datos son: Escala nominal La escala de medida nominal asigna una característica no numérica a un fenómeno, por lo que sólo se pueden hacer comparaciones de tipo cualitativo. Por ejemplo, un mapa de cuencas hidrográficas, un mapa de suelos. Este es el nivel más elemental de medida, pues no informa acerca de la cantidad o el orden.
Escala ordinal La escala de medida ordinal establece una cierta jerarquía no mensurable o no cuantificable entre los diferentes elementos. Por ejemplo, un mapa en el que aparecen núcleos de población, cuyos símbolos están jerarquizados según el número de habitantes sin especificar cantidad.
Escala cuantitativa o de intervalo La escala cuantitativa o de intervalo asigna una característica numérica a un fenómeno geográfico. Por ejemplo, en un mapa de temperaturas medias los intervalos son valores numéricos (expresados en grados Celsius o Fahrenheit). Es necesario emplear algún tipo de unidad convencional.
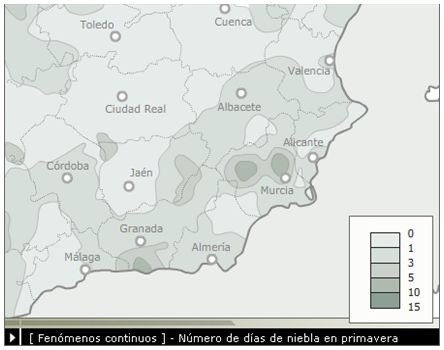
DISTRIBUCIÓN Fenómenos continuos Los fenómenos continuos son los que tienen presencia en todos los puntos del territorio objeto de representación, aunque sólo se tengan medidas de algunos puntos significativos. Por ejemplo: la temperatura, altitud sobre en nivel del mar, niveles de contaminación atmosférica, índice de gramíneas, pluviometría, densidad de población, etc.
Fenómenos discretos Los fenómenos discretos son los que tiene presencia en algunos puntos del territorio objeto de representación. Un ejemplo son los datos de población, dado que se localizan en determinadas áreas y no en todos los puntos del territorio. Algunos fenómenos discretos pueden transformarse en continuos mediante la aplicación de una relación. Por ejemplo, el número de habitantes de una provincia (fenómeno discreto) pasa a ser un fenómeno continuo cuando se habla de densidad de población: la relación se aplica dividiendo el número de habitantes por la superficie de la provincia en km2.
TÉCNICAS DE SIMBOLIZACIÓN CARTOGRÁFICA
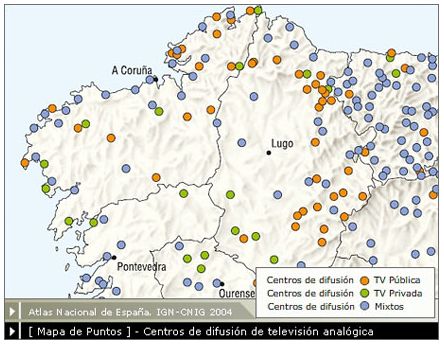
Una información cartografiada es cualitativa cuando describe características no numéricas. El objetivo de los mapas cualitativos es mostrar la distribución espacial de un grupo de datos nominales. La información aportada por el mapa es cuantitativa cuando describe valores numéricos. Los mapas cuantitativos muestran un orden de importancia relativa y la mayoría cuantifican numéricamente las diferencias. La mayor parte de los mapas temáticos del Atlas Nacional de España son cuantitativos. Así, el proceso que transforma la información alfanumérica en expresión gráfica se denomina "simbolización cartográfica". TÉCNICAS DE SIMBOLIZACIÓN DE DATOS CUALITATIVOS Mapas de datos puntuales Características Los mapas cualitativos de datos puntuales identifican el fenómeno y lo sitúan según sus coordenadas. Los fenónemos implicados tienen una situación espacial única (x,y) y un atributo que es representado en el mapa mediante símbolos que no deben implicar ningún tipo de jerarquía.
Simbolización Los símbolos pueden ser geométricos (abstractos) y pictóricos (que aluden al concepto representado). Los símbolos pictóricos tienen la gran ventaja de ser fáciles de reconocer, evitando así recurrir constantemente a la leyenda para su identificación. Leyenda En la leyenda es fundamental que se aprecien con claridad los diferentes símbolos, el color que se utiliza para cada variable y puede haber referencia textual.
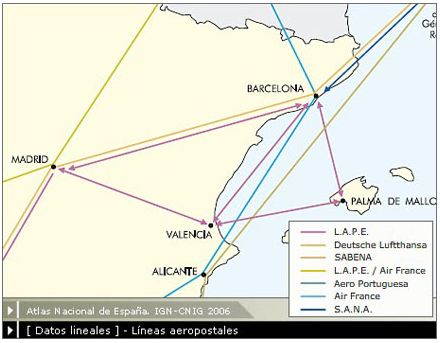
Mapas de datos lineales
Características Los datos lineales cualitativos se refieren a los fenómenos que tienen una forma lineal definida, como carreteras, ríos, fronteras, rutas de viaje, etc.
Simbolización Color y forma son las variables visuales adecuadas para diferenciar características cualitativas en elementos lineales. Si se elige el color para diferenciar unas líneas de otras, se aplicarán distintas variaciones de tono, procurando que su valor o claridad sea parecido para no pueda establecerse ningún tipo de jerarquía. Leyenda En la leyenda es fundamental que se aprecien con claridad los diferentes símbolos, el color que se utiliza para cada cada variable y puede haber referencia textual.
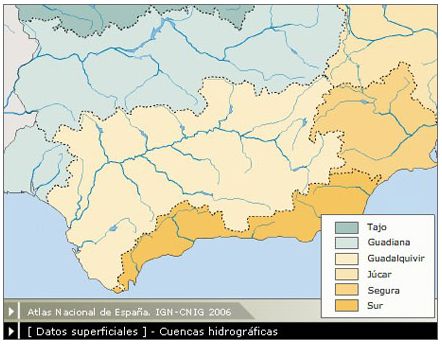
Mapas de datos superficiales
Características Los mapas cualitativos informan sobre la distribución de fenómenos que ocupan extensiones superficiales. Ejemplos clásicos son los mapas de suelos, geológicos, forestales, etc. que ofrecen información cualitativa o descriptiva acerca de estos temas o variables.
Simbolización Para distinguir las categorías (cualitativas) se emplean colores en los que varíe únicamente el tono (amarillo, verde, violeta, etc.) Leyenda En la leyenda es fundamental que se aprecien con claridad los diferentes símbolos, el color que se utiliza para cada variable y puede haber referencia textual.
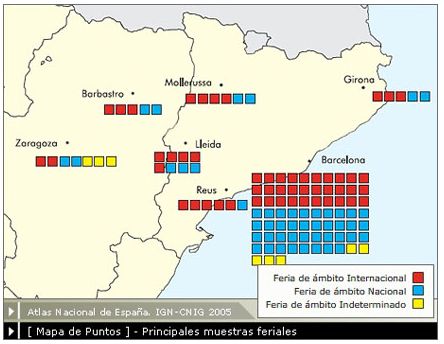
TÉCNICAS DE SIMBOLIZACIÓN DE DATOS CUANTITATIVOS Mapas de puntos Características El método se basa en el uso de una serie de símbolos puntuales uniformes para representar una cantidad de datos mediante la repetición de un símbolo puntual. Cada punto equivale a un valor unitario de forma que se acumulan y repiten hasta alcanzar el valor total. Estos mapas son fácilmente comprensibles y muestran de un modo efectivo la variación locacional de la distribución de un fenómeno.
Simbolización Convencionalmente se utiliza el punto, sin variación en su forma o tamaño y, únicamente, se colocan más o menos puntos según la mayor o menor ocurrencia del fenómeno. Leyenda Cada uno de los símbolos utilizados en el mapa aparece con el mismo tamaño en la leyenda, junto con la expresión textual del dato o fenómeno que representan.
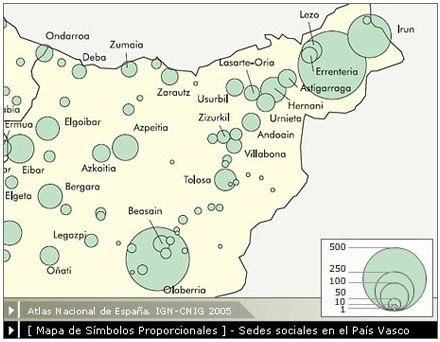
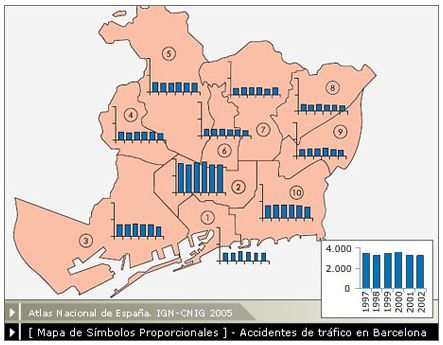
Mapas de símbolos proporcionales Características Los símbolos proporcionales son los más utilizados en cartografía temática cuantitativa. Se selecciona un símbolo fijo (círculo, cuadrado, triángulo) y se varía su tamaño en proporción a la cantidad que se representa. El símbolo localiza el dato y, mediante su tamaño, informa acerca de la cantidad relativa en ese punto. Los símbolos proporcionales se utilizan para representar cualquier tipo de datos (absolutos y relativos) asociados a veces a superficies.
Ejemplo: Para representar el número de sedes sociales de empresas localizadas en el País Vasco se ha utilizado el círculo como forma geométrica, que informa mediante la variable tamaño de la cantidad de sedes en cada una de las localidades. Se han rotulado sólo las entidades locales que presentan un número significativo de sedes, para simplificar la lectura del mapa. Simbolización Se puede elegir un símbolo lineal, superficial o volumétrico en el que el escalado o variación de tamaño sea claramente visible. El más utilizado es el círculo y el de más difícil comprensión la esfera. Leyenda Es fundamental que la relación entre el tamaño del símbolo y la cantidad que representa esté claramente indicada.
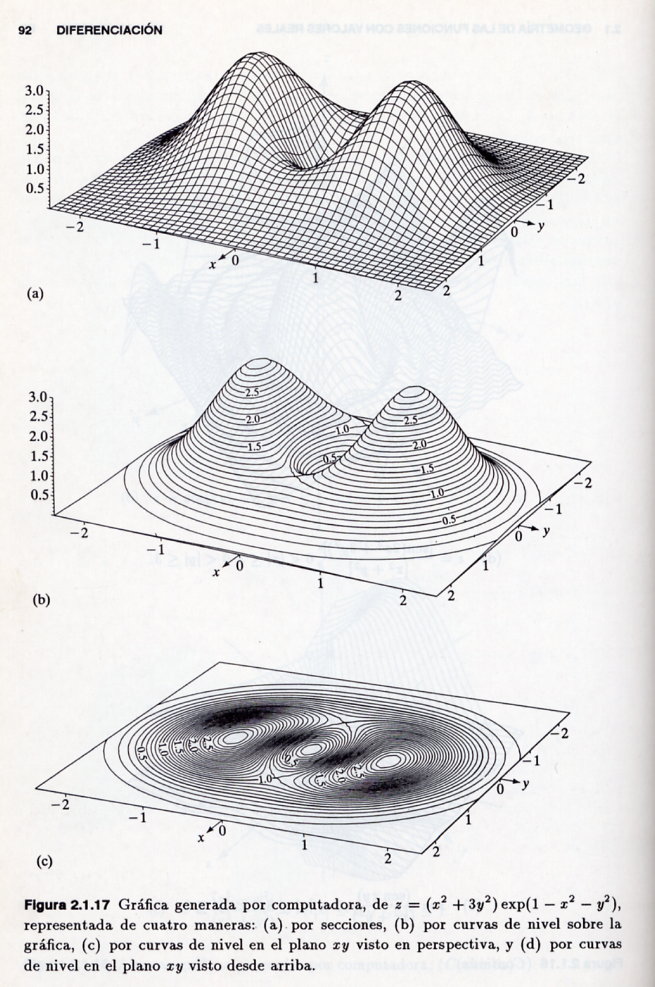
Mapas de isolíneas Características Una isolínea es una línea con un valor constante asociado a todos sus puntos. Un mapa de isolíneas es la representación bidimensional de un volumen suavizado, mediante el uso de isolíneas que unen puntos en los que la variable toma un valor constante. El dato está en todos los puntos del espacio de forma continua pero sólo se mide en los llamados puntos de control. El uso de isolíneas es una de las técnicas más utilizadas en cartografía para representar distribuciones continuas de datos. A cada fenómeno geográfico representado le corresponde una denominación concreta de isolínea: por ejemplo, si el valor constante es la altitud se habla de curvas de nivel; si es la temperatura se denomina isotermas, y si los puntos de las isolíneas tienen igual presión se denominan isobaras.
Simbolización Las líneas se trazan con intervalos, a ser posible, constantes; además, pueden colorearse los espacios interlineales con gamas de color secuenciales. Debe elegirse un grosor y color adecuado para las líneas y además debe considerarse la posibilidad de introducir en el mapa rótulos con los valores de las líneas.
El valor del fenómeno en cada punto situado entre dos isolíneas se obtiene por
interpolación. Leyenda Se indica el valor de la equidistancia de las isolíneas y se puede asignar un color a cada intervalo; en estos casos, los colores de los intervalos deben pertenecer a una gama suave, utilizando el valor más oscuro de la gama para los valores más altos del fenómeno.
Mapas de flujo Características Los mapas de flujo sirven para mostrar el dinamismo de ciertos fenómenos. El movimiento se simboliza mediante una línea, que une los lugares origen y final del movimiento. Algunos ejemplos son mapas de corrientes marinas, red de transporte, migraciones, etc.
Simbolización Los símbolos utilizados en estos mapas son de tipo lineal para indicar la dirección, y a menudo en forma de flecha cuando se quiere indicar el sentido del flujo. Las anchuras de las líneas de flujo deben estar escaladas proporcionalmente al valor que representan. Leyenda La leyenda puede ser: línea reglada, barra en forma de escalera, líneas con valores específicos y líneas con valores de intervalo.
Mapas de coropletas Características Se utilizan para representar fenómenos discretos asociados a unidades de enumeración, generalmente superficies administrativas (países, provincias, municipios, etc.). Un ejemplo clásico son los mapas de densidad de población.
Simbolización La simbología superficial que se utiliza consiste en la variación en términos de claro-oscuro de un color. Es importante tener en cuenta que en la percepción de un color influyen los colores que le rodean, por lo que los colores deben distinguirse perfectamente a simple vista. El valor numérico dentro de cada superficie o unidad de enumeración se mantiene constante. Leyenda Los intervalos están representados por colores, que deben corresponderse con una gama de colores contrastados, para su correcta identificación.
Cartogramas Características Los cartogramas son mapas en los que las unidades de enumeración son proporcionales al dato representado; carecen de mapa base, ya que es la propia base geográfica la que se convierte con su distorsión en contenido temático. Se distinguen dos tipos de cartogramas: contiguos (las unidades de enumeración son adyacentes) y no contiguos (no se preservan las relaciones de contigüidad entre las unidades por lo que aparecen huecos entre ellas). Simbolización Las unidades de enumeración (los municipios, las provincias, los países) son por sí mismas símbolos proporcionales a la vez que sirven como mapa base convencional. Leyenda Reseña el valor de la unidad que representa la variable a estudio.
|
|
Actualizado el
25/11/2009 Eres
el visitante número
|